
Электронные системы для измерения степени уплотнения насыпных грунтов
Исследования и разработки, связанные с внедрением роботов в строительство, ведутся в самых различных направлениях. Однако к настоящему времени число практически применяемых роботов ограничивается лишь роботами для отделки бетонных полов при строительстве зданий, окрасочными роботами, роботами для набрызга бетона при сооружении тоннелей и некоторыми другими. Это объясняется тем, что большая часть строительных работ связана с разработкой грунта, то есть отсутствием такого важного условия применения роботов, как возможность выполнения циклических операций.
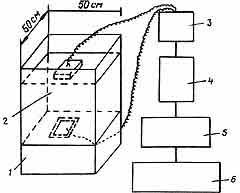
Рис. 1. Испытательное устройство: 1 — деревянная форма; 2 — проба грунта; 3 — усилитель; 4 — преобразователь частоты; 5 — осциллограф; 6 — графопостроитель в декартовых координатах.
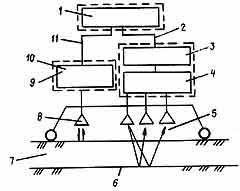
Рис. 2. Устройство системы, основанной на использовании электромагнитных волн: 1 — вычислительная часть; 2 — канал поступления данных о скорости распространения электромагнитных волн; 3 — блок обработки сигналов; 4 — импульсный приемопередатчик; 5 — электромагнитные волны; 6 —основание; 7 — насыпной грунт; 8 — инфракрасный излучатель; 9, 10 — гигрометр и процессор; 11 — канал поступления данных о влажности грунта.

Рис. 3. Принцип определения местоположения излучателя при помощи оптического измерения угловых перемещений: 1 — излучающее устройство (стробо-импульсная лампа); 2 — приемные устройства; 3 — персональный компьютер.
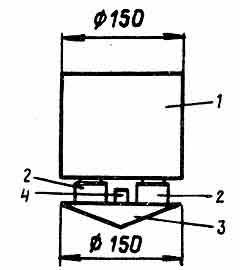
Рис. 4. Импедансная головка: 1 — корпус с грузом внутри; 2 — измерители нагрузки; 3 — конический наконечник; 4 — акселерометр.
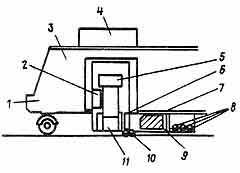
Рис. 5. Устройство системы, основанной на использовании рассеянного радиоизотопного излучения: 1 — наружный корпус; 2 — усилитель; 3 — тележка; 4 — операционный блок, индикаторное устройство; 5 — предусилитель; 6 — защитный экран; 7 — контейнер источника излучения; 8 — трубки детектирования тепловых нейтронов (трубка НЕ-3); 9 — источник излучения; 10 — полый экран; 11 — сцинтилляционный счетчик.
В связи с такой ситуацией министерством строительства Японии был принят направленный на повышение уровня строительных работ путем внедрения электроники, мехатроники и другой передовой техники проект комплексного технического развития под названием "Разработка систем повышения уровня строительных работ на основе использования электроники", в том числе внедрения в строительство промышленных роботов, средств информации и тому подобной техники. Для этого были разработаны машины и системы, к числу которых относятся системы измерения степени уплотнения насыпных грунтов. Конечной целью этой разработки была не просто автоматизация операций контроля за ведением уплотнительных работ, но и создание системы, которая бы составной частью входила в комплекс средств, обеспечивающих высокоэффективное и высококачественное ведение дорожно-строительных работ.
При ведении уплотнительных работ, требующих обеспечения высокого качества и однородности, важно постоянно вести контроль за степенью уплотнения материала и получать данные в удобной форме. Это позволяет сразу же использовать полученные данные по степени уплотнения для последующего ведения работ, наладив таким образом обратную связь.
При разработке систем контроля ограничились тремя способами измерения степени уплотнения грунта. Были выбраны также два способа определения местоположения излучателя.
Разработка систем велась совместно с фирмами "Токю кэнсэцу", "Фудо кэнсэцу". "Мицуи кэнсэцу" и НИИ министерства строительства. Результатами этой работы являются измерительные системы (аппараты), испытания которых были проведены в НИИ министерства строительства Японии.
Система контроля уплотнения с использованием электромагнитных волн
Измерение степени уплотнения
Принцип проведения измерений степени уплотнения основан на зависимости скорости распространения электромагнитных волн в грунте от его влажности и определении плотности сухого грунта. Для определения зависимости между скоростью распространения электромагнитных волн и плотностью сухого материала были приведены испытания на специальном устройстве (см. рис. 1) для различных типов грунтов.
Измерив скорость распространения электромагнитных волн в грунте и его влажность, можно определить плотность в сухом состоянии. Скорость Vs распространения электромагнитных волн в грунте выражается следующей формулой:
V s=C/E r 0,5, (1)
где С - скорость света (2,998х10 9 м/с);
E r - относительная диэлектрическая проницаемость грунта.
В ходе экспериментальных исследований было выяснено, что относительная диэлектрическая проницаемость грунта обычно выражается следующей формулой:
E r 0,5=E s 0,5 x Ф s+E w 0,5 x Ф w++E a 0,5 x Ф a, (2)
где E s, E w, E a - относительная диэлектрическая проницаемость частиц грунта, воды, воздуха;
Ф s, Ф w, Ф a - объемные коэффициенты частиц грунта, воды, воздуха.
В свою очередь, объемные коэффициенты воды, воздуха и грунта определяются из следующих зависимостей:
Ф w=WxR d; Ф a=1-R d(1/G s+W); Ф s=R d/G s; (3)
где W - влажность;
R d - плотность сухого материала;
G s - удельный вес частиц грунта.
Подставив эти выражения в две приведенные выше формулы, получим:
R d=C/V s - E a 0,5/[E s 0,5/G s + E w 0,5 х W - E a 0,5(1/G s+ W)], (4)
Таким образом, если заранее определить величины Es, Ew, Ea, Gs и измерить в полевых условиях величины W и V, то можно найти плотность сухого грунта, которая является показателем степени уплотнения. Для нахождения влажности используется метод, при котором создаются два равных световых пучка: пучок ближнего инфракрасного излучения, на которое не оказывает влияния влажность, и пучок излучения с другой длиной волны, при которой излучение поглощается исследуемым веществом. Содержание влаги вычисляют на основе сопоставления энергии отраженных обоих световых пучков. В этой системе был применен хорошо зарекомендовавший себя при использовании в других областях инфракрасный гигрометр многоволнового типа (с различными относительными длинами волн).
Источником излучения служит вольфрамовая лампа. Поправка на влажность воздуха осуществляется автоматически с помощью датчика влажности.
Системы для определения степени уплотнения состоит из двух сенсорных (см. рис. 2) частей, включающих в себя бесконтактный инфракрасный гигрометр для измерения влажности грунта, и локатор для измерения скорости распространения электромагнитных волн, а также из вычислительной части, определяющей по данным измерений, полученным с помощью данных сенсорных частей, степень уплотнения грунта.
Определение местоположения излучателя при помощи оптического измерения угловых перемещений
Определение местоположения излучателя (см. рис. 3) основано на слежении двух произвольно расположенных приемных устройств за произвольно перемещающимся излучающим устройством, местоположение которого определяется по расстоянию между приемными устройствами и углами между приемными устройствами и излучающим устройством. Для определения местоположения излучателя, находящегося вне помещения, используется стробо-импульсная лампа, мигающая с частотой в несколько сот герц, что позволяет видеть ее на фоне естественного света.
Приемные устройства состоят из сенсорной части и механизма слежения. В сенсорной части с помощью фотодиода с изображением излучателя принимается падающее излучение, осуществляются усиление сигнала, фильтрация, сглаживание, вычисляется угол. Механизм слежения с приводом от импульсного двигателя при приближении излучателя к границам зоны изображения производит поворот устройства, с тем чтобы изображение вновь оказалось в центре зоны. Информация об угловых положениях механизма слежения сенсорной части посылается в компьютер, и на основе известного расстояния между приемными устройствами вычисляется местоположение излучателя.
Система контроля степени уплотнения
Измеряя степень уплотнения грунта и определяя местоположение излучателя по мере поступления информации, составляется карта степени уплотнения в зонах работ, по которой определяется порядок последующих уплотнительных операций, обнаруживаются места с недостаточной степенью уплотнения, требующие повторной операции.
Система контроля степени уплотнения, основанная на использовании импедансной головки
Измерение степени уплотнения
По мере уплотнения грунта обычно увеличиваются такие показатели, как сухая объемная плотность, коэффициент реакции основания, а также изменяются характеристики динамического зондирования. Механический импеданс представляет собой показатель, оценивающий динамическую жесткость вещества по сопротивлению вибрациям. Принцип измерений, проводимых с помощью импедансной головки, сводится к возбуждению импульсных вибраций путем ударов о грунт опускаемого наконечника (импедансной головки), измерению в точке контакта импедансной головки с грунтом силы удара и частоты колебаний, вибраций, определению контактного импеданса грунта и головки, расчету на этой основе степени уплотнения грунта.
Импедансная головка, используемая при испытаниях фундаментов (см. рис. 4), состоит из внедряющегося в грунт наконечника и измеряющих в это время ускорение, частоту колебаний и силу удара акселерометра и двух измерителей нагрузки.
Определение местоположения излучателя
Для определения местоположения излучателя была использована оптическая система измерения угловых перемещений с использованием импедансной головки.
С помощью данной системы, так же, как и с помощью предыдущей системы, основанной на использовании электромагнитных волн, по мере поступления информации составляется карта степени уплотнения в зоне ведения работ.
Система контроля степени уплотнения, основанная на использовании рассеянного радиоизотопного излучения
Измерение степени уплотнения
Для измерения степени уплотнения используется также способ, основанный на зависимости рассеивания гамма-излучения от плотности исследуемого вещества. Для измерения влажности использован способ, основанный на превращении быстрых нейтронов в тепловые при столкновении с ядрами атомов водорода. В настоящее время широко применяются радиоизотопные измерители плотности и влажности поверхностно-просвечивающего типа, однако, поскольку их использование связано с необходимостью погружения в грунт источника излучения, выполнение измерений при непрерывном передвижении является затруднительным.
В отличие от них радиоизотопные измерители плотности и влажности поверхностно-рассеивающего типа могут применяться в условиях непрерывного перемещения и осуществлять контроль без разрушения исследуемого материала.
Однако проведенные ранее исследования выявили много проблем, связанных с точностью измерения этими приборами. При разработке конструкции данной системы (см. рис. 5) и анализе полученных данных была использована новейшая техника, позволившая повысить точность измерений и сделать систему пригодной для практического использования.
Определение местоположения и ходовые качества
В отличие от двух предыдущих систем, для передвижения которых требовался каток или другое транспортное средство, данная система монтируется на самоходной тележке. Максимальная грузоподъемность тележки составляет 150 кг, скорость движения 20 м/мин. Она может двигаться вперед, назад, поворачиваться вправо и влево, делать развороты на месте, преодолевать уклон 1/10. На тележке устанавливается аварийная блокировка, которая срабатывает при наезде на препятствие, а также имеется предупредительная сигнализация - речевое оповещение, в случае обнаружения датчиком близкого действия приближения к препятствию.
Для определения местоположения тележки в пределах зоны измерений служат встроенные датчики (датчик расстояния, магнитный датчик направления, виброгироскоп), детектирующие пройденное расстояние и направление, то есть применена автономная навигационная система, постоянно следящая за местоположением тележки.
Датчик расстояния монтируется на оси тележки и определяет угол поворота и частоту вращения колеса. Учитывая реальные условия эксплуатации, а также расположение вблизи ходовой части, этот датчик имеет защитный кожух.
Магнитный датчик направления, выполненный в виде катушки, намотанной на кольцеобразный железный сердечник, осуществляет обнаружение внешнего магнитного поля (земного магнетизма). По электрическому сигналу датчика, величина которого соответствует силе магнитного поля, вычисляется направление и, основываясь на этом, определяется угол, образуемый по отношению к первоначальному направлению движения. Обычно изменения магнитного поля влекут за собой изменения в определении направления, приближение к магнитным телам, появление высокого напряжения, которые оказывают весьма значительное отрицательное влияние на работу датчика. Однако данный датчик мало подвержен влиянию вибраций.
Виброгироскоп является датчиком угловой скорости. На него не оказывают никакого влияния приближение к намагниченным телам и другие факторы, вызывающие изменение магнитного поля земли.
Таким образом, за счет использования в данной автономной навигационной системе двух этих датчиков, преимущества каждого из которых компенсирует недостатки другого, удалось добиться повышенной точности курсовых данных. Для того чтобы накапливаемая ошибка данной навигационной системы не увеличивалась бесконечно, применяется еще одна навигационная система в виде информационных матов, укладываемых по границам зоны измерений и несущих информацию о границе зоны и местоположении тележки на этой границе. Эта навигационная система помимо информационных матов, укладываемых на месте ведения работ, содержит датчик для обнаружения матов и считывания с них информации. На информационные маты наносится опознавательный узор в виде решетки. Зависимость между этим узором и местом укладки мата заранее закладывается в память системы. Если в процессе движения этот узор обнаруживается электромагнитным датчиком близкого действия, то на основании заложенной в память информации легко и точно определяется местоположение тележки в данный момент. Таким образом, эти маты выполняют роль своеобразных маркеров.
За счет использования двух систем, дающих информацию о положении тележки, накопленная внутри рабочей зоны погрешность уменьшается до нуля на границе этой зоны и таким образом удается постоянно держать погрешность измерения местоположения, не выходящей за определенные пределы.
Система контроля степени уплотнения
Устройство, полученное на основе объединения описанных систем измерения степени уплотнения и системы определения местоположения, руководствуясь заранее заложенной в него траекторией передвижения, перемещается, производит измерения и в пределах требуемой зоны составляет по мере поступления информации карту степени уплотнения материала.
Евгений МАРГАЙЛИК,инженер и патентовед ВОИР
Строительство и недвижимость. Статья была опубликована в номере 30 за 1999 год в рубрике дороги
