Роботы. Лето-2011
Общую тематику этого летнего выпуска можно обозначить двумя фразами: «techno- versus bio-» и «techno- with bio-». У любой медали есть две стороны, и, например, тот же молоток можно использовать в качестве полезного инструмента либо как оружие. Все зависит от того, как на него смотрит тот или иной человек. Современные технические решения, несомненно, требуют от людей не только высокой культуры пользования, образования (в чем роботы нас догоняют и скоро перегонят), но и ответственности. Начнем с военных…
Вообще, ситуация последних лет демонстрирует общую тенденцию перехода от конкретных устройств или решений к системам. В частности, сейчас уже довольно редко встречается аббревиатура UAV (Unmanned Aerial Vehicle — беспилотные воздушные машины), и ей на смену пришла UAS (Unmanned Aerial System). Примерно такое же преобразование может ожидать и наземных роботов, хотя… под системами сейчас нередко воспринимается уже все вкупе независимо от способа передвижения. И к этому были и есть все предпосылки: используются одинаковые алгоритмы, операционные системы (при этом нельзя не вспомнить и вообще специальную ОС для роботов — ROS, на которой уже базируется несколько десятков коммерческих моделей, в том числе и известный PR2), фактически идентичная элементная база.
Сейчас, говоря о беспилотных системах, в большинстве случаев подразумевают разведку, но в действительности те же новинки демонстрируют другую целевую нишу, а именно, ведение полноценных военных действий удаленно с командного центра, который может быть расположен за тысячи километров от центра событий. Все это больше напоминает для операторов обычную компьютерную игру. И тут у данного варианта есть одна очень серьезная проблема — человеческая. А именно, насколько способен оператор принять правильное решение в рамках определенной сложившейся ситуации? Например, сможет ли он правильно отличить группу мирных граждан от военных и так далее? В этом может таиться определенная опасность.
MAST и килоботы
 Мы уже несколько рас писали о глобальной программе американских военных MAST, в рамках которой реализуются роботы, управляемые некоей единой командной системой. Сама MAST стартовала достаточно давно, но только в последние годы мы можем увидеть ее реальные результаты. Нужно сказать, что в отличие от других подобных программ, разработчики устройств под нее преследуют цели создания дешевых роботов, при этом самым дорогим элементом всей системы является общий центр управления, наделенный искусственным интеллектом. Основные сферы применения подобных систем — разведка местности, отслеживание изменений в определенно заданном периметре. Что касается последнего, то тут очень многое упирается в вопросы само-реконфигурации системы в случае выхода из строя одного или нескольких устройств. В принципе, подобную задачу с математической точки зрения может решить любой студент-программист. Подобные алгоритмы были уже не раз реализованы в схожих задачах по отслеживанию текущего состояния в помещениях.
Мы уже несколько рас писали о глобальной программе американских военных MAST, в рамках которой реализуются роботы, управляемые некоей единой командной системой. Сама MAST стартовала достаточно давно, но только в последние годы мы можем увидеть ее реальные результаты. Нужно сказать, что в отличие от других подобных программ, разработчики устройств под нее преследуют цели создания дешевых роботов, при этом самым дорогим элементом всей системы является общий центр управления, наделенный искусственным интеллектом. Основные сферы применения подобных систем — разведка местности, отслеживание изменений в определенно заданном периметре. Что касается последнего, то тут очень многое упирается в вопросы само-реконфигурации системы в случае выхода из строя одного или нескольких устройств. В принципе, подобную задачу с математической точки зрения может решить любой студент-программист. Подобные алгоритмы были уже не раз реализованы в схожих задачах по отслеживанию текущего состояния в помещениях.
Но есть и альтернатива самой архитектуре, реализуемой в MAST и других схожих программах, а именно, без единого командного центра управления. Тут сразу вспоминается некогда нашумевшая разработка с «умными» минными полями, в рамках которой при взрыве одной мины все остальные самостоятельно меняли свое положение с целью охвата требуемой площади покрытия.
А в общем, мы говорим о некоей совокупности устройств, ведущих себя как единое целое. Что интересно, в биологии есть множество схожих моделей поведения, поэтому изобретатели роботов какое-то время активно изучали поведение стай рыб и птиц, организацию жизнедеятельности муравьев и так далее. В одно время даже появилось целое направление, которое пока еще является научно-популярной фантастикой, и в рамках которой предусматривается использование множества нано-ботов, в совокупности выполняющих определенную задачу, например, построение помещений на других планетах и их адаптация к жизнедеятельности человека.
Летом этого года Гарвардский Университет продемонстрировал миру свое новое изобретение — килоботы (kilobots, www.eecs.harvard.edu/ssr/projects/progSA/kilobot.html). Это самоорганизующаяся система, основными действующими «организмами» которой являются небольшие (размером с монету) роботы. Каждый из них имеет в наличии литий-ионную батарею на 3,4 вольта, коей хватает на три часа, ИК-приемник, с помощью которого робот может анализировать месторасположение своих «соплеменников», и микроконтроллер, отвечающий за все вычисления. Движение килобота довольно интересно: оно базируется на двух сервомоторах, при этом само устройство стоит на трех упругих металлических ножках, а смещения вправо-влево-вперед реализуются за счет вибрации. Суммарная стоимость одного килобота очень низка и составляет $14.
Уникальность этой разработки состоит именно в том, что единого командного центра управления как такового нет — все роботы являются полностью автономными в принятии решений исходя из ситуации. Экспериментаторы сейчас ставят перед ними задачи различного толка (занять центр группы, кооперация в добыче «пищи» и так далее). Как вы понимаете, данные механизмы не имеют практической ценности, но при этом очень интересны с точки зрения всевозможных исследований. Впрочем, подобное можно успешно проводить и на чисто программном уровне, а разработчики компьютерных игр, особенно в сфере создания ИИ множества NPC (несобственных персонажей) и их поведения в рамках групп, изучили эту тему достаточно глубоко. Но в данном конкретном случае мы говорим о целом подразделении Гарвардского Университета, которое занимается конкретно самоорганизующимися системами.
Экзоскелет HULC тестируется U.S. Army
 Экзоскелет от Lockheed Martin — HULC уже перешел от этапа экспериментальных исследований к этапу полноценного освоения этих технологий военными. Сейчас он передан в исследовательский центр U.S. Army Natick Soldier Research, Development and Engineering Center (Натик, Массачусетс). И здесь уже рассматриваются вопросы адаптации солдат, использующих экзоскелет. Проверяется множество параметров, проводятся сопутствующие биомеханические тесты, при этом напомним, что данное изобретение позволяет переносить грузы до 90,7 кг, а батарей питания хватает для перемещения на расстояние до 20 км в рамках реального природного ландшафта. Управление производится за счет специального микрокомпьютера. В рамках тестирования сейчас главным образом проверяются все физиологические параметры солдата в идентичных условиях с использованием экзоскелета и без него.
Экзоскелет от Lockheed Martin — HULC уже перешел от этапа экспериментальных исследований к этапу полноценного освоения этих технологий военными. Сейчас он передан в исследовательский центр U.S. Army Natick Soldier Research, Development and Engineering Center (Натик, Массачусетс). И здесь уже рассматриваются вопросы адаптации солдат, использующих экзоскелет. Проверяется множество параметров, проводятся сопутствующие биомеханические тесты, при этом напомним, что данное изобретение позволяет переносить грузы до 90,7 кг, а батарей питания хватает для перемещения на расстояние до 20 км в рамках реального природного ландшафта. Управление производится за счет специального микрокомпьютера. В рамках тестирования сейчас главным образом проверяются все физиологические параметры солдата в идентичных условиях с использованием экзоскелета и без него.
Роботы и запахи
Вообще, интерактивное взаимодействие между роботом и человеком — довольно интересная тема. Интересна она, прежде всего, тем, что ею вполне серьезно занимается множество научных исследовательских лабораторий по всему миру. Но если в ряде случаев мы можем говорить о конкретном практическом смысле, например, возможности робота обучаться новым действиям в рамках повторения движений человека и запоминания их, то в некоторых исследованиях и предложениях прослеживаются не совсем понятные вещи (с первого взгляда). Дизайнер Kevin Grennan предложил использовать запахи для стимуляции определенных поведенческих ассоциаций, и создать специально для робота некое подобие потовых желез. По мнению Кевина, запах мужского пота (а если конкретно, то химическое вещество андростадиенон) влияет на настроение и сосредоточенность женщин — Греннан предложил использовать его на конвейерах, обслуживаемых женскими коллективами. А если, например, использовать окситоцин (вещество, которое содержится в человеческом мозге), то при его вдыхании человек начинает относиться к его источнику более доверительно — этот вариант Греннан предлагает использовать для хирургических роботов. А внешне изобретение этого дизайнера напоминает человеческую подмышку, хотя он предлагает и другие визуальные формы.
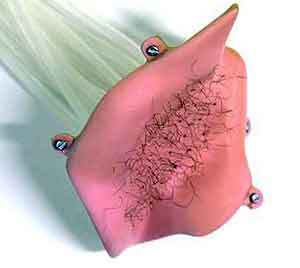 Искусственные потовые железы для робота (предложение Кевина Греннана)
Искусственные потовые железы для робота (предложение Кевина Греннана)
В принципе, изобретение Кевина не удостоилось бы нашего внимания, если бы весь мир вокруг нас уже не был бы заполнен большим количеством химических суррогатов. Я имею в виду, например, чипсы со вкусом бекона, запиваемые газировкой с ароматом яблока, и так далее. Мы живем в мире ассоциаций, которые довольно легко подменить. Это же распространяется и на общение людей друг с другом, в рамках которого также задействуются пять чувств восприятия.
Недавно проводились исследования, касающиеся восприятия людьми правдоподобно выглядящих андроидов. Нужно сказать, что если того же обычного робота с его видимыми механическими частями (сервоприводами, проводами и т.п.) человек воспринимал вполне нормально, то человекоподобное обличье очень многих отпугивало. И хотя те же разработчики реалистично выглядящих андроидов потратили очень много усилий на то, чтобы все движения последних были максимально близкими к человеческим, большинство людей заметили искусственность и восприняли ее скорее отрицательно. Но, тем не менее, эксперименты не стоят на месте. Работа с запахами, в том числе искусственными потовыми железами — из той же оперы. Причем если рассматривать ситуацию более глубоко, то современные андроиды, пусть они и выглядят очень реалистично, имеют нечувствительную кожу, и как раз над этим вопросом сейчас также работает сразу несколько исследовательских лабораторий.
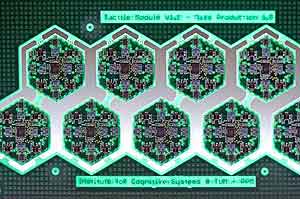 Фрагмент чувствительной робо-кожи Hexagonal Skin от Technical University Munich (TUM)
Фрагмент чувствительной робо-кожи Hexagonal Skin от Technical University Munich (TUM)
На самом деле, данная тема очень интересна и имеет практический смысл. Многие, конечно, подумают о куклах в магазинах для взрослых, но в более широком смысле это направление затрагивает медицину (протезирование), более близкого проникновения робототехники уровня robo sapience в нашу повседневную жизнь. Несколько лет назад известный ученый Джастин Раттнер (вице-президент и технический директор компании Intel) сделал прогноз, что к 2050 году появятся компьютеры, не уступающие по интеллекту и вычислительным мощностям человеческому мозгу. Вместе с тем, многие специалисты вам скажут, что подобные системы есть уже и сейчас, и им (специалистам) с определенной натяжкой можно верить.
Кристофер http://itcs.3dn.ru
Вообще, ситуация последних лет демонстрирует общую тенденцию перехода от конкретных устройств или решений к системам. В частности, сейчас уже довольно редко встречается аббревиатура UAV (Unmanned Aerial Vehicle — беспилотные воздушные машины), и ей на смену пришла UAS (Unmanned Aerial System). Примерно такое же преобразование может ожидать и наземных роботов, хотя… под системами сейчас нередко воспринимается уже все вкупе независимо от способа передвижения. И к этому были и есть все предпосылки: используются одинаковые алгоритмы, операционные системы (при этом нельзя не вспомнить и вообще специальную ОС для роботов — ROS, на которой уже базируется несколько десятков коммерческих моделей, в том числе и известный PR2), фактически идентичная элементная база.
Сейчас, говоря о беспилотных системах, в большинстве случаев подразумевают разведку, но в действительности те же новинки демонстрируют другую целевую нишу, а именно, ведение полноценных военных действий удаленно с командного центра, который может быть расположен за тысячи километров от центра событий. Все это больше напоминает для операторов обычную компьютерную игру. И тут у данного варианта есть одна очень серьезная проблема — человеческая. А именно, насколько способен оператор принять правильное решение в рамках определенной сложившейся ситуации? Например, сможет ли он правильно отличить группу мирных граждан от военных и так далее? В этом может таиться определенная опасность.
MAST и килоботы
Но есть и альтернатива самой архитектуре, реализуемой в MAST и других схожих программах, а именно, без единого командного центра управления. Тут сразу вспоминается некогда нашумевшая разработка с «умными» минными полями, в рамках которой при взрыве одной мины все остальные самостоятельно меняли свое положение с целью охвата требуемой площади покрытия.
А в общем, мы говорим о некоей совокупности устройств, ведущих себя как единое целое. Что интересно, в биологии есть множество схожих моделей поведения, поэтому изобретатели роботов какое-то время активно изучали поведение стай рыб и птиц, организацию жизнедеятельности муравьев и так далее. В одно время даже появилось целое направление, которое пока еще является научно-популярной фантастикой, и в рамках которой предусматривается использование множества нано-ботов, в совокупности выполняющих определенную задачу, например, построение помещений на других планетах и их адаптация к жизнедеятельности человека.
Летом этого года Гарвардский Университет продемонстрировал миру свое новое изобретение — килоботы (kilobots, www.eecs.harvard.edu/ssr/projects/progSA/kilobot.html). Это самоорганизующаяся система, основными действующими «организмами» которой являются небольшие (размером с монету) роботы. Каждый из них имеет в наличии литий-ионную батарею на 3,4 вольта, коей хватает на три часа, ИК-приемник, с помощью которого робот может анализировать месторасположение своих «соплеменников», и микроконтроллер, отвечающий за все вычисления. Движение килобота довольно интересно: оно базируется на двух сервомоторах, при этом само устройство стоит на трех упругих металлических ножках, а смещения вправо-влево-вперед реализуются за счет вибрации. Суммарная стоимость одного килобота очень низка и составляет $14.
Уникальность этой разработки состоит именно в том, что единого командного центра управления как такового нет — все роботы являются полностью автономными в принятии решений исходя из ситуации. Экспериментаторы сейчас ставят перед ними задачи различного толка (занять центр группы, кооперация в добыче «пищи» и так далее). Как вы понимаете, данные механизмы не имеют практической ценности, но при этом очень интересны с точки зрения всевозможных исследований. Впрочем, подобное можно успешно проводить и на чисто программном уровне, а разработчики компьютерных игр, особенно в сфере создания ИИ множества NPC (несобственных персонажей) и их поведения в рамках групп, изучили эту тему достаточно глубоко. Но в данном конкретном случае мы говорим о целом подразделении Гарвардского Университета, которое занимается конкретно самоорганизующимися системами.
Экзоскелет HULC тестируется U.S. Army
Роботы и запахи
Вообще, интерактивное взаимодействие между роботом и человеком — довольно интересная тема. Интересна она, прежде всего, тем, что ею вполне серьезно занимается множество научных исследовательских лабораторий по всему миру. Но если в ряде случаев мы можем говорить о конкретном практическом смысле, например, возможности робота обучаться новым действиям в рамках повторения движений человека и запоминания их, то в некоторых исследованиях и предложениях прослеживаются не совсем понятные вещи (с первого взгляда). Дизайнер Kevin Grennan предложил использовать запахи для стимуляции определенных поведенческих ассоциаций, и создать специально для робота некое подобие потовых желез. По мнению Кевина, запах мужского пота (а если конкретно, то химическое вещество андростадиенон) влияет на настроение и сосредоточенность женщин — Греннан предложил использовать его на конвейерах, обслуживаемых женскими коллективами. А если, например, использовать окситоцин (вещество, которое содержится в человеческом мозге), то при его вдыхании человек начинает относиться к его источнику более доверительно — этот вариант Греннан предлагает использовать для хирургических роботов. А внешне изобретение этого дизайнера напоминает человеческую подмышку, хотя он предлагает и другие визуальные формы.
В принципе, изобретение Кевина не удостоилось бы нашего внимания, если бы весь мир вокруг нас уже не был бы заполнен большим количеством химических суррогатов. Я имею в виду, например, чипсы со вкусом бекона, запиваемые газировкой с ароматом яблока, и так далее. Мы живем в мире ассоциаций, которые довольно легко подменить. Это же распространяется и на общение людей друг с другом, в рамках которого также задействуются пять чувств восприятия.
Недавно проводились исследования, касающиеся восприятия людьми правдоподобно выглядящих андроидов. Нужно сказать, что если того же обычного робота с его видимыми механическими частями (сервоприводами, проводами и т.п.) человек воспринимал вполне нормально, то человекоподобное обличье очень многих отпугивало. И хотя те же разработчики реалистично выглядящих андроидов потратили очень много усилий на то, чтобы все движения последних были максимально близкими к человеческим, большинство людей заметили искусственность и восприняли ее скорее отрицательно. Но, тем не менее, эксперименты не стоят на месте. Работа с запахами, в том числе искусственными потовыми железами — из той же оперы. Причем если рассматривать ситуацию более глубоко, то современные андроиды, пусть они и выглядят очень реалистично, имеют нечувствительную кожу, и как раз над этим вопросом сейчас также работает сразу несколько исследовательских лабораторий.
На самом деле, данная тема очень интересна и имеет практический смысл. Многие, конечно, подумают о куклах в магазинах для взрослых, но в более широком смысле это направление затрагивает медицину (протезирование), более близкого проникновения робототехники уровня robo sapience в нашу повседневную жизнь. Несколько лет назад известный ученый Джастин Раттнер (вице-президент и технический директор компании Intel) сделал прогноз, что к 2050 году появятся компьютеры, не уступающие по интеллекту и вычислительным мощностям человеческому мозгу. Вместе с тем, многие специалисты вам скажут, что подобные системы есть уже и сейчас, и им (специалистам) с определенной натяжкой можно верить.
Кристофер http://itcs.3dn.ru
Компьютерная газета. Статья была опубликована в номере 28 за 2011 год в рубрике технологии
