Роботы. Весна-2011
Что интересно, беспилотная и даже просто дистанционно управляемая робототехника — это очень молодая прикладная научная дисциплина, которая только-только начала внедряться в производство. Ситуация в Японии показала, что хороших машин катастрофически не хватает, поэтому были просьбы к Германии, в стороне не остались и США. Причем поддержка ультрасовременными роботами — это очень ощутимая помощь, учитывая тот момент, что операции нужно производить в зонах повышенной радиации.
 QinetiQ Nord America отправила в Японию своих роботов, среди моделей есть пресловутый Talon
QinetiQ Nord America отправила в Японию своих роботов, среди моделей есть пресловутый Talon
Стоит сказать, что на тему современной робототехники даже после японских событий очень многие смотрят как на что-то несерьезное: «ну, тешат себя ученые». А на самом деле, это одна из самых важных отраслей на сегодня, и одна из ключевых в перспективе. Сейчас можно отметить пять мировых держав, которые значительно преуспели в робототехнике, — Япония, США, Германия, Великобритания, Южная Корея. Есть, конечно, и некоторые островки, например, Швейцария, в которой находится одна из самых известных европейских фирм — Macroswiss. Постоянно нагоняет мировые технологии Китай. Другие же страны в большинстве своем предпочитают наблюдать со стороны, как те накачивают мускулы. А дальнейшая ситуация вполне понятна: кто первый — того и рынок, и технологии.
Причем роботы — это будущий стратегический ресурс в области безопасности каждой современной страны. Аварии, природные катаклизмы — от них не застрахуешься. В Европе, США, Азии подготовке специалистов в области робототехники уделяется огромное внимание, реализуются специальные соревнования для студентов и так далее. Это во-первых. Во-вторых, современный уровень технологий требует соответствующего уровня пользования. Другими словами, роботами нужно уметь управлять, иначе это просто груда металлолома.
 Мощная дистанционно управляемая колесная платформа QinetiQ Dragon также приняла (или принимает) участие в ликвидации последствий аварии АЭС в Японии
Мощная дистанционно управляемая колесная платформа QinetiQ Dragon также приняла (или принимает) участие в ликвидации последствий аварии АЭС в Японии
Сегодня мы рассмотрим очередные весенние новинки.
Робот для интубации. Первые тесты на людях
Стоит сказать, что для создателей робототехники существуют две сферы, где есть заказчики, всегда готовые заплатить за новые изобретения — это военные и медики. Что касается последних, то сейчас уже никого не удивишь робо-хирургией, которая в последнее время все больше совершенствуется, и теперь хирургам даже предлагают варианты с 3D-дисплеями. Также автоматизации/роботизации подвергаются другие области медицины, а весной этого года появилась новость о том, что первый робот для интубации был опробован на людях.
 Речь идет о дистанционно управляемой системе Kepler Intubation System (KIS), разработанной профессором по анестезии из McGill University Health Centre (Монреаль), доктором Томасом М. Хеммерлингом (Thomas M. Hemmerling) и его командой.
Речь идет о дистанционно управляемой системе Kepler Intubation System (KIS), разработанной профессором по анестезии из McGill University Health Centre (Монреаль), доктором Томасом М. Хеммерлингом (Thomas M. Hemmerling) и его командой.
По словам автора изобретения, интубация как таковая иногда может вызывать трудности и у опытного медицинского персонала, потому как пациенты встречаются разные.
В варианте KIS предлагается управляемый джойстиком видео-ларингоскоп, и пользователь системы может наблюдать всю имеющуюся картину за трахеей пациента, после чего можно аккуратно и точно установить трубку.
После целого ряда проверок на манекенах KIS был опробован на пациентах — все прошло без всяких затруднений.
Стоит сказать, что это не первый успешный робот Хеммерлинга, в 2008-м он с командой сделал систему анестезии McSleepy.
Вообще в данной области работы идут планомерно и поступательно, то есть сначала реализуют особо точные и информативные системы с дистанционным управлением. Со временем растут расстояния этого самого дистанционного управления. Для многих изобретателей сейчас является целью-мечтой воплощение совершенной робототехнической станции медицинского обслуживания, в рамках которой врачи управляют действиями роботов удаленно. Это может реализоваться, как уже предлагают некоторые разработчики, в дополнительной оснастке машин скорой помощи. В общем, время покажет.
Робо-протез AMO
 К слову сказать, японская робототехника, известная в первую очередь своими большими успехами в области создания роботов-гуманоидов, начала развиваться во многом в силу медицинской необходимости. После Второй мировой войны очень многим жителям этой страны понадобились протезы, разработкой и совершенствованием которых начали активно заниматься ученые. После успехи в данной сфере начали перекочевывать в смежные области, и как факт — у японцев среди первых в мире появились роботы-гуманоиды.
К слову сказать, японская робототехника, известная в первую очередь своими большими успехами в области создания роботов-гуманоидов, начала развиваться во многом в силу медицинской необходимости. После Второй мировой войны очень многим жителям этой страны понадобились протезы, разработкой и совершенствованием которых начали активно заниматься ученые. После успехи в данной сфере начали перекочевывать в смежные области, и как факт — у японцев среди первых в мире появились роботы-гуманоиды.
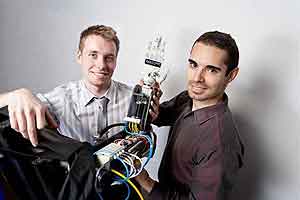
Впрочем, обсуждаемая проблема носит общемировой характер, и сегодня мы расскажем об изобретении двух канадских студентов Тиаго Кайреса (Thiago Caires) и Михала Привата (Michal Prywata) — робо-протезе руки AMO. В отличие от множества уже имеющихся решений на миоэлектрических моторах, AMO функционирует на пневматике, то есть в качестве движущей силы используется сжатый воздух. Другой отличительной особенностью изобретения является способ организации управления. А именно, на голову человека надевается специальное приспособление, которое считывает с мозга необходимые команды и передает их беспроводным путем микроконтроллеру AMO. На данный момент студенты продемонстрировали уже рабочую версию робо-протеза, причем на написание программного обеспечения для него был затрачен целый год, озвучили цену ($80 тыс.), а также открыли свою собственную фирму Bionik Laboratories Inc. (http://www.bioniklabs.com).
Новые исследования изобретателей направлены на реализацию независимого движения пальцев в AMO.
Летающая новинка от Festo
 Компания Festo, активно занимающаяся бионическими, то есть повторяющими биологические формы, робототехническими системами, с завидной регулярностью выдает новинки. Не успели все отойти от ее великолепной реализации слоновьего робо-хобота, как появляется вообще уникальная новинка — робототехническая эмуляция морской чайки. До этого птиц (по крайней мере, на моей памяти) механически еще никто не повторял, а тут удалось.
Компания Festo, активно занимающаяся бионическими, то есть повторяющими биологические формы, робототехническими системами, с завидной регулярностью выдает новинки. Не успели все отойти от ее великолепной реализации слоновьего робо-хобота, как появляется вообще уникальная новинка — робототехническая эмуляция морской чайки. До этого птиц (по крайней мере, на моей памяти) механически еще никто не повторял, а тут удалось.
Модель SmartBird весит 450 г, размах крыльев составляет 1,96 м! В рамках этой ультралегкой модели крылья не только машут вверх-вниз, но и могут менять степень отклонения, тем самым регулируя поворот и скорость, осуществлено планирование. Удивительно, что все это реализовано на базе всего двух электромоторов. SmartBird управляется дистанционно по протоколу ZigBee.
Полезный робот от Zen Robotics
Финская компания Zen Robotics создала по существу уникального и очень полезного автономного робота Recycler. Что он может? Ни много ни мало, а сортировать мусор по материалам. Система полностью автономна и оборудована искусственным интеллектом с массивом необходимых для работы датчиков, среди которых несколько типов камер в различных диапазонах (включая ИК, УФ), лазерные 3D-сканеры, тактильные сенсоры, металлодетекторы, считыватели штрих-кодов и т. п. В общем, имеется буквально весь арсенал современных датчиков и камер.
 Разработчики заявляют о возможности распознавания/идентификации широкого спектра пластиковых материалов, камня, дерева и т.п., а также объектов типа батареек и лампочек.
Разработчики заявляют о возможности распознавания/идентификации широкого спектра пластиковых материалов, камня, дерева и т.п., а также объектов типа батареек и лампочек.
В феврале должны были пройти первые испытания Recycler, где ставилась задача точной идентификации хотя бы 50% из числа всех объектов. Вообще, резонен вопрос: сколько эта армада из ультрасовременных датчиков будет в итоге стоить, и как быстро сможет себя окупить? Во многих странах мира этой работой занимаются люди, причем сама работа является социальной, предлагается безработным и т.п. Узнав об испытаниях Recycler, многие представители социальных служб далеко не обрадовались такой новости.
Модульный iMobot
 Уф-ф, давненько мы не писали о модульных роботах, поэтому напомню вкратце, о чем речь. Модульные роботы — это системы, складывающиеся из идентичных блоков, в итоге чего может получиться любая необходимая форма (например, гусеница, паук, гуманоид) и т.п. Главная особенность — все составные блоки одинаковы.
Уф-ф, давненько мы не писали о модульных роботах, поэтому напомню вкратце, о чем речь. Модульные роботы — это системы, складывающиеся из идентичных блоков, в итоге чего может получиться любая необходимая форма (например, гусеница, паук, гуманоид) и т.п. Главная особенность — все составные блоки одинаковы.
Тема, на самом деле, очень интересная, причем она начала в очередной, n-й по счету раз серьезно прорабатываться в период 2003-2007 гг. Увлекательно все и с научно-философской точки зрения, а именно, совокупность идентичных механизмов ведет себя как один организм. Эта тема всегда довольно подробно изучалась и для целей освоения космоса. Представьте себе такого трансформера: сначала ползет как змея, потом, если это неудобно, трансформируется в паука и так далее.
Но во время финансового кризиса о робототехнике как таковой забыли и начали вспоминать только сейчас, поэтому совместное изобретение учителя профессора механики и аэрокосмической инженерии Калифорнийского Университета Гарри Ченга (Harry Cheng) и его ученика Грэма Райлэнда (Graham Ryland) заинтересовало очень многих. Но… тех, кто знает, что собой представляют модульные роботы. Ченг и Райлэнд создали небольшой структурный блок iMobot, в который можно вживлять электронику (камеры, датчики и т.п.), а сам он состоит из двух структурных элементов.
Главное в данном случае, как мне кажется, все-таки довести изобретение до какого-нибудь более-менее полезного воплощения. Это раз. Второй момент — очень неплохо бы было, если бы профессор с его учеником не замкнулись на проекте, а создали вокруг него сообщество, как это сделали, к примеру, разработчики PR2. Те отдали интернет-сообществу буквально все, включая исходные коды, и сейчас PR2 программируется всем Интернетом:). Очень хорошая идея. Думается, что и в варианте iMobot так поступить было бы правильнее всего. Запрограммировать сложную структуру, сделанную из iMobot’ов, — весьма привлекательная задачка.
На сим все.
Кристофер
Стоит сказать, что на тему современной робототехники даже после японских событий очень многие смотрят как на что-то несерьезное: «ну, тешат себя ученые». А на самом деле, это одна из самых важных отраслей на сегодня, и одна из ключевых в перспективе. Сейчас можно отметить пять мировых держав, которые значительно преуспели в робототехнике, — Япония, США, Германия, Великобритания, Южная Корея. Есть, конечно, и некоторые островки, например, Швейцария, в которой находится одна из самых известных европейских фирм — Macroswiss. Постоянно нагоняет мировые технологии Китай. Другие же страны в большинстве своем предпочитают наблюдать со стороны, как те накачивают мускулы. А дальнейшая ситуация вполне понятна: кто первый — того и рынок, и технологии.
Причем роботы — это будущий стратегический ресурс в области безопасности каждой современной страны. Аварии, природные катаклизмы — от них не застрахуешься. В Европе, США, Азии подготовке специалистов в области робототехники уделяется огромное внимание, реализуются специальные соревнования для студентов и так далее. Это во-первых. Во-вторых, современный уровень технологий требует соответствующего уровня пользования. Другими словами, роботами нужно уметь управлять, иначе это просто груда металлолома.
Сегодня мы рассмотрим очередные весенние новинки.
Робот для интубации. Первые тесты на людях
Стоит сказать, что для создателей робототехники существуют две сферы, где есть заказчики, всегда готовые заплатить за новые изобретения — это военные и медики. Что касается последних, то сейчас уже никого не удивишь робо-хирургией, которая в последнее время все больше совершенствуется, и теперь хирургам даже предлагают варианты с 3D-дисплеями. Также автоматизации/роботизации подвергаются другие области медицины, а весной этого года появилась новость о том, что первый робот для интубации был опробован на людях.
По словам автора изобретения, интубация как таковая иногда может вызывать трудности и у опытного медицинского персонала, потому как пациенты встречаются разные.
В варианте KIS предлагается управляемый джойстиком видео-ларингоскоп, и пользователь системы может наблюдать всю имеющуюся картину за трахеей пациента, после чего можно аккуратно и точно установить трубку.
После целого ряда проверок на манекенах KIS был опробован на пациентах — все прошло без всяких затруднений.
Стоит сказать, что это не первый успешный робот Хеммерлинга, в 2008-м он с командой сделал систему анестезии McSleepy.
Вообще в данной области работы идут планомерно и поступательно, то есть сначала реализуют особо точные и информативные системы с дистанционным управлением. Со временем растут расстояния этого самого дистанционного управления. Для многих изобретателей сейчас является целью-мечтой воплощение совершенной робототехнической станции медицинского обслуживания, в рамках которой врачи управляют действиями роботов удаленно. Это может реализоваться, как уже предлагают некоторые разработчики, в дополнительной оснастке машин скорой помощи. В общем, время покажет.
Робо-протез AMO
Впрочем, обсуждаемая проблема носит общемировой характер, и сегодня мы расскажем об изобретении двух канадских студентов Тиаго Кайреса (Thiago Caires) и Михала Привата (Michal Prywata) — робо-протезе руки AMO. В отличие от множества уже имеющихся решений на миоэлектрических моторах, AMO функционирует на пневматике, то есть в качестве движущей силы используется сжатый воздух. Другой отличительной особенностью изобретения является способ организации управления. А именно, на голову человека надевается специальное приспособление, которое считывает с мозга необходимые команды и передает их беспроводным путем микроконтроллеру AMO. На данный момент студенты продемонстрировали уже рабочую версию робо-протеза, причем на написание программного обеспечения для него был затрачен целый год, озвучили цену ($80 тыс.), а также открыли свою собственную фирму Bionik Laboratories Inc. (http://www.bioniklabs.com).
Новые исследования изобретателей направлены на реализацию независимого движения пальцев в AMO.
Летающая новинка от Festo
Модель SmartBird весит 450 г, размах крыльев составляет 1,96 м! В рамках этой ультралегкой модели крылья не только машут вверх-вниз, но и могут менять степень отклонения, тем самым регулируя поворот и скорость, осуществлено планирование. Удивительно, что все это реализовано на базе всего двух электромоторов. SmartBird управляется дистанционно по протоколу ZigBee.
Полезный робот от Zen Robotics
Финская компания Zen Robotics создала по существу уникального и очень полезного автономного робота Recycler. Что он может? Ни много ни мало, а сортировать мусор по материалам. Система полностью автономна и оборудована искусственным интеллектом с массивом необходимых для работы датчиков, среди которых несколько типов камер в различных диапазонах (включая ИК, УФ), лазерные 3D-сканеры, тактильные сенсоры, металлодетекторы, считыватели штрих-кодов и т. п. В общем, имеется буквально весь арсенал современных датчиков и камер.
В феврале должны были пройти первые испытания Recycler, где ставилась задача точной идентификации хотя бы 50% из числа всех объектов. Вообще, резонен вопрос: сколько эта армада из ультрасовременных датчиков будет в итоге стоить, и как быстро сможет себя окупить? Во многих странах мира этой работой занимаются люди, причем сама работа является социальной, предлагается безработным и т.п. Узнав об испытаниях Recycler, многие представители социальных служб далеко не обрадовались такой новости.
Модульный iMobot
Тема, на самом деле, очень интересная, причем она начала в очередной, n-й по счету раз серьезно прорабатываться в период 2003-2007 гг. Увлекательно все и с научно-философской точки зрения, а именно, совокупность идентичных механизмов ведет себя как один организм. Эта тема всегда довольно подробно изучалась и для целей освоения космоса. Представьте себе такого трансформера: сначала ползет как змея, потом, если это неудобно, трансформируется в паука и так далее.
Но во время финансового кризиса о робототехнике как таковой забыли и начали вспоминать только сейчас, поэтому совместное изобретение учителя профессора механики и аэрокосмической инженерии Калифорнийского Университета Гарри Ченга (Harry Cheng) и его ученика Грэма Райлэнда (Graham Ryland) заинтересовало очень многих. Но… тех, кто знает, что собой представляют модульные роботы. Ченг и Райлэнд создали небольшой структурный блок iMobot, в который можно вживлять электронику (камеры, датчики и т.п.), а сам он состоит из двух структурных элементов.
Главное в данном случае, как мне кажется, все-таки довести изобретение до какого-нибудь более-менее полезного воплощения. Это раз. Второй момент — очень неплохо бы было, если бы профессор с его учеником не замкнулись на проекте, а создали вокруг него сообщество, как это сделали, к примеру, разработчики PR2. Те отдали интернет-сообществу буквально все, включая исходные коды, и сейчас PR2 программируется всем Интернетом:). Очень хорошая идея. Думается, что и в варианте iMobot так поступить было бы правильнее всего. Запрограммировать сложную структуру, сделанную из iMobot’ов, — весьма привлекательная задачка.
На сим все.
Кристофер
Компьютерная газета. Статья была опубликована в номере 16 за 2011 год в рубрике технологии
