системы местоопределения в сотовых сетях
Задача позиционирования мобильных телефонов предполагает автоматическое определение их местоположения в пределах сотовых сетей. При этом под термином "местоположение" следует понимать не нахождение географических координат — широты и долготы (что в принципе также возможно), а однозначную идентификацию положения владельца мобильного телефона на местности (электронной карте).
Способы определения положения, основанные на использовании только оборудования сети, могут выдавать данные непрерывно и без всякого уведомления абонента или его разрешения. Когда MSC (Mobile Switching Centre) необходимо опросить местоположение подвижной станции, он обращается к VLR (Visited Location Register). Если подвижная станция инициирует процедуру местоопределения с MSC, он информирует свой VLR, который заносит всю изменяющуюся информацию в свои регистры. Эта процедура происходит всегда, когда MS (Mobile Station) переходит из одной области местоопределения в другую. В случае, если абонент запрашивает специальные дополнительные услуги или изменяет некоторые свои данные, MSC также информирует VLR, который регистрирует изменения и при необходимости сообщает о них HLR. В этой процедуре используется так называемый B-интерфейс.
Для расширения обмена данными о положении подвижной станции и управления процессом связи используется D-интерфейс. Основные услуги, предоставляемые подвижному абоненту, заключаются в возможности передавать или принимать сообщения независимо от местоположения, поэтому HLR должен пополнять свои данные. VLR сообщает HLR о положении MS, управляя ею и переприсваивая ей номера в процессе блуждания и посылает все необходимые данные для обеспечения обслуживания подвижной станции.
технологии построения систем местоопределения
Основными технологиями построения систем позиционирования являются:
— метод направления прихода сигнала;
— дальномерный метод;
— метод фиксации времени прибытия сигналов;
— позиционирование по разности моментов времени прихода сигналов;
— локализация с помощью дополненной системы GPS;
— разностно-дальномерные системы;
— угломерно-разностно-дальномерные системы;
— система позиционирования по "радиоотпечаткам";
— интегрированные системы.
Применительно к сотовым телефонам для решения задачи их позиционирования с точностью до соты может быть применен метод СОО (Сell of Origin), базирующийся на геометрических расчетах. Так как зоны приема базовых станций сети на местности известны, то существует возможность определить, какие из них могут принять (а при использовании секторных антенн и приближенно запеленговать) сигналы телефона. На основе полученных данных определяется территория, в пределах которой находится пользователь мобильного телефона: в лучшем случае 150 м (пикосота), в худшем — до 30 км.
Для определения положения радиопередающего устройства могут быть использованы три основных параметра радиосигналов: их амплитуда в месте приема, направление прихода и время задержки при распространении.
Амплитуда принимаемых сигналов способна характеризовать расстояние между передатчиком и приемником. Однако на практике уровень сигналов мобильного телефона в месте приема зависит от столь большого числа причин, что в большинстве случаев не может обеспечить требуемую точность определения места и используется в качестве вспомогательного параметра.
Направление прихода сигналов может автоматически определяться, например, по различию фаз сигналов на элементах антенной решетки, установленной на базовой станции сотовой сети. Пересечение пеленгов из двух (или большего числа) мест обеспечивает (с определенной точностью) определение положения мобильного телефона.
Задержка сигналов при распространении может быть также использована при решении задачи позиционирования. При точно известном моменте времени передачи радиосигналов, измеряя время их прихода в приемник базовой станции, можно вычислить расстояние от мобильного телефона до базовой станции при условии жесткой временной синхронизации (желательно до долей микросекунды) всех элементов системы. Именно эта технология позиционирования сотовых телефонов легла в основу большинства применяемых в настоящее время систем местоопределения.
В специализированных системах при определенном дооснащении базовых станций специальной аппаратурой может быть реализовано позиционирование абонентов сети, основанное на классических методах радиопеленгации — угломерном, дальномерном и разностно-дальномерном.
метод направления прихода сигналов
При реализации угломерного метода (метод направления прихода сигналов, Angle of Arrival, АОА) измеряемыми параметрами являются углы направления прихода излучения радиотелефонаa1и a2 [град] относительно линии (базы), соединяющей две сотовые станции сети (рис. 1).

Рис. 1. Реализация угломерного метода
Для определения направления прихода сигналов сотовых телефонов используются фазированные антенные решетки, устанавливаемые на базовых станциях сети и подключаемые к существующему оборудованию системы связи. Нахождение местоположения абонента осуществляется при приеме сигналов его мобильного телефона хотя бы двумя приемниками. В случае если сигнал получен только одним приемником, для определения местоположения может использоваться дополнительная информация на основе оценки амплитуды сигнала.
К числу достоинств данного метода относится независимость работы станций, каждая из которых дает информацию об азимуте мобильного телефона. При этом все необходимые калибровки приемников для компенсации разброса их параметров, влияния изменений температуры и т.п. локальны для каждой станции и не налагают дополнительных требований на всю сеть. Однако для достижения требуемой точности необходимо определение пеленгов с весьма малой погрешностью.
Погрешность определения положения абонента относительно его истинного местонахожденияsn[км] при известной величине расстояния D6[км] между соседними базовыми станциями, принявшими его сигнал, и измеренных углах a1и a2с ошибкой sa [град] составляет

Минимальная погрешность достигается при соотношении (a1 + a2) = 90° и может быть рассчитана по формуле

дальномерный метод
При реализации дальномерного метода (рис. 2) измеряемыми параметрами являются временные задержкиDt1[c] и Dt2[c]распространения сигнала радиотелефона абонента не менее чем до двух сотовых станций сети относительно их временных шкал, которые должны быть синхронизированы между собой, а рассчитываемыми параметрами — дальности от сотовых станций до места расположения абонента D1= 3×105×Dt1[км] и D1= 3×105×Dt2[км].
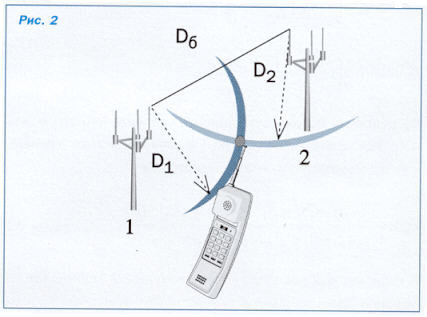
Рис. 2. Реализация дальномерного метода.
Для расстояния между базовыми станциямиD6[км], известной ошибке измерения временных интерваловst[с] (одинаковой для каждой базовой станции) и рассчитанных дальностяхD1и D2погрешность положения абонента относительно его истинного местонахождения sn [км] может быть рассчитана как
При расстояниях между сотовыми станциямиD61[км], D62[км], известной ошибке измерения временных интерваловst[с] (равной для каждой сотовой станции), рассчитанных дальностяхD1и D2базовые углы определяются по формулам
Погрешность положения абонента относительно его истинного местонахождения sn [км] в данном методе меньше, чем в дальномерном, и определяется как

В современных системах позиционирования мобильных телефонов дальномерный и разностно-дальномерный методы пеленгования представлены многочисленными вариациями.
Далее представлены лишь некоторые из них.
метод фиксации времени прибытия сигналов
Данный метод основан на измерении интервалов времени, за которые сигнал мобильного телефона доходит до нескольких базовых станций, оснащенных блоками определения местоположения LMU.
По этим временам прибытия компьютер сети может определить время прохождения сигнала до соответствующих базовых станций, сравнить полученные результаты с расчетными и с помощью алгоритма триангуляции рассчитать местоположение пользователя. Такая система обладает хорошей точностью, но требует оснащения блоками LMU почти всех базовых станций. Кроме того, сеть должна подключать к прослушиванию телефона, запрашивающего свои координаты, другие соты, соседствующие с той, которая нормально обслуживает зону его текущего местоположения.
Для обеспечения требуемой точности возможна синхронизация внутренних часов сети с помощью спутниковой системы GPS. Такой метод получил название UL-ТОА (Uplink Time of Arrival). Все данные через сеть оператора связи поступают в вычислительный центр, где устанавливается местонахождение абонента с точностью не хуже 125 м. Наглядно метод UL-TOA представлен на рис. 4.

Рис. 4. Метод Uplink TOA.
метод позиционирования по разности моментов времени прихода сигналов
Этот метод основан на точном определении времени приема сигналов сотового телефона в трех (или более) базовых станциях сети. На основе вычисления разницы значений времен поступления сигналов в парах мест вычисляются гиперболические линии положения передатчика. Источник сигнала будет находиться в точке пересечения двух гипербол. Точность, достигаемая при использовании данной технологии, зависит от ограничений ширины полосы частот сигнала, точности синхронизации элементов системы и среды распространения сигнала (флуктуаций скорости распространения радиоволн в атмосфере в зависимости от изменений температуры, влажности, давления и др.).
Метод фиксации разности времен прихода сигналов (OTDOA, Observed Time Difference of Arrival) в значительной степени подобен методу ТОА. Телефонный аппарат измеряет время прохождения сигнала до него от ближайшей базовой станции, оснащенной блоком LMU, и сравнивает его с соответствующими временами не менее чем еще для двух таких станций.
Расстояния между базовыми станциями известны, что позволяет рассчитать расстояния от каждой из них до сотового телефона и определить его местоположение. Все сложные вычисления выполняет имеющийся в сети центр локализации мобильных телефонов МLС (Mobile Location Center).
Преимущество этой системы состоит в том, что она позволяет обойтись меньшим числом LМU (всего примерно лишь для четверти базовых станций). Кроме того, системе не нужно давать команду базовым станциям слушать мобильные телефоны, не находящиеся непосредственно в их зонах действия. Для этого используется опция самого мобильного телефона, который и так всегда слушает другие сайты сотовой связи, чтобы не потерять связь при перемещении из одной соты в другую.
Кроме того, в данном случае не нужна и дорогая спутниковая система для синхронизации часов в сети LMU. Поскольку известны расстояния между LMU в сети и времена прохождения сигнала от мобильного телефона до различных LMU и обратно, уравнение для определения местоположения решается однозначно.
локализация с помощью дополненной системы GPS
Некоторые компании идут по пути встраивания GPS-приемников в мобильные телефоны, чтобы те могли принимать сигналы от ряда спутников и по этим сигналам вычислять свое местоположение. При установке в радиотелефоны абонентов дополнительных модулей (чипов) могут быть реализованы способы их позиционирования, основанные на космических методах радионавигации.
При реализации радионавигационного метода в телефонный аппарат абонента должен быть встроен специальный навигационный модуль. На него возложены функции расчета дальности от абонента до трех ИСЗDi(i=1,2,З) и геоцентрических (декартовых) координат ИСЗхsi, уsi, zsi(i=1,2,З) на основе дальномерных и информационных сигналов, передаваемых с ИСЗ. Далее из решения системы 3 уравнений вида

определяются геодезические координаты абонента ха, уа, zа. Данный радионавигационный метод получил название локализации с помощью дополненной системы GPS (Assistant GPS, A-GPS).
Процесс, когда обычный приемник GPS вычисляет местоположение, начинается с попытки найти первый навигационный спутник, идентификации, определения его положения. Затем находится следующий и так далее. С каждого спутника загружаются информация, измеренные временные задержки и лишь затем вычисляется местоположение данного приемника. Процесс местоопределения может занимать от 40 с до нескольких минут, а также требует прямой видимости по крайней мере трех спутников.
Метод А-GPS (рис. 5) объединяет классическую информацию GPS с географическим программным обеспечением и мобильной информацией сети.
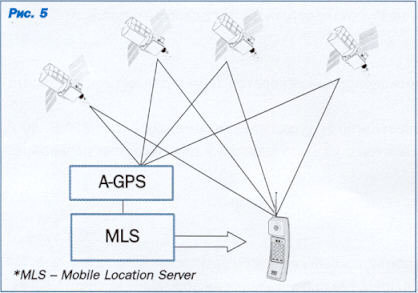
Рис. 5. Реализация радионавигационного метода.
Сеть указывает мобильному телефону, какие именно спутники следует искать. При этом количество шагов, необходимое для вычисления его местоположения, уменьшается примерно с 10 до 3. Для уменьшения потребления энергии от батареи мобильного телефона данные спутниковых измерений передаются в сеть и на нее возлагается выполнение необходимых расчетов. Пользователям придется приобретать новые мобильные телефоны со встроенными GPS-приемниками и антенной.
Точность позиционирования при использовании данного метода значительно выше, что обусловлено жесткой синхронизацией временных шкал всех элементов системы.
Измеряя фазовые, временные и амплитудные параметры фрагментов радиосигнала мобильного телефона, отраженного от препятствий (зданий, возвышенностей и т.п.), базовая станция оценивает структуру подобного "радиоотпечатка" (fingerprint) сигнала и вычисляет его "сигнатуру" (signature). Полученная информация сравнивается системой со своей базой образцов таких "сигнатур", соответствующих разным вариантам расположения мобильного абонента на местности (рис. 6).
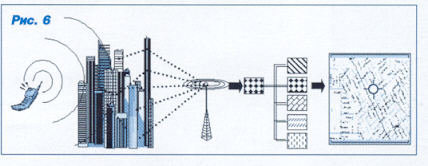
Рис. 6. Метод "радиоотпечатков".
разностно-дальномерные системы
В большинстве разрабатываемых сейчас систем в за основу принят метод прибытия ТОА и различные его модификации.
Получив сообщение от телефона, центр расчетов положения MLC запрашивает информацию из ближайших к телефону измерительных модулей системы LMU и, сравнивая относительные времена приема сигналов в известных фиксированных пунктах, вычисляет положение телефона. Весь процесс занимает не более нескольких секунд и зависит от времени ожидания пакета данных. Модули LMU размещаются в пределах сотовой сети в таких известных фиксированных пунктах, где они могут контролировать соседние базовые станции. Ориентировочно один LMU необходим на каждые четыре станции сети. Модули могут размещаться обособленно или на базовых станциях.
На испытаниях была достигнута среднеквадратическая погрешность (СКП) позиционирования — 90 м, но в большинстве экспериментов достигалась точность лучше 50 м.
Для системы позиционирования Cursor английской компании Cambridge Positioning Systems (СРS) практически не требуется установки оператором дополнительного оборудования, однако необходимо обновление программного обеспечения (ПО) мобильных терминалов (в них встраивается дополнительный чип). Точность позиционирования системы Cursor в реальных городских условиях и помещениях составляет около 75 м. Cursor работает и с терминалами, неоснащенными соответствующим ПО, но в этом случае СКП достигает 1 км.
Для позиционирования владелец мобильного телефона совершает обычный звонок. При этом его телефон до установки речевого соединения посылает специальное SМS-сообщение (но возможно и просто изменение формата передачи сообщений). SМS-сообщение содержит информацию о сигналах, непрерывно транслируемых базовыми станциями при нормальной работе сети и уже полученных телефоном в неактивном режиме в предшествующий период.
угломерно-разностно-дальномерные системы
Первоначально в системе TeleSentinel для определения местоположения сотового телефона использован лишь метод АОА. В объединенной системе TeleSentinel-TruePosition для повышения точности применяется комбинация методов АОА и ТDОА (рис.7). Пеленгование осуществляется как по сигналам канала управления, так и речевым сигналам без внесения каких-либо модификаций в мобильное оборудование. Система может применяться с любым форматом сигнала. Точность местоопределения составляет не хуже 125 м, быстродействие системы — не более 10 с.
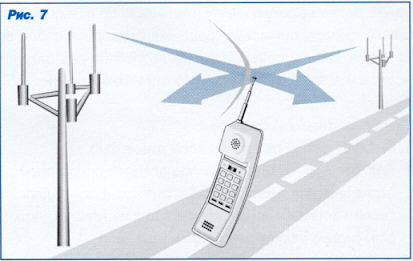
Рис. 7.Комбинирование методов TDOA и AOA.
Компания SigmaOne Communications Corp. в угломерно-разностно-дальномерной системе позиционирования Sigma-5000 также использует указанные методы измерений вместе с запатентованной SigmaOne технологией определения положения PowerBoost, включающей специализированные алгоритмы учета многолучевости.
В результате объединения технологий позиционирования значительно уменьшаются погрешности каждой из них, взятых по отдельности. Sigma-5000 уверенно позиционирует объект, даже если только две базовые станции приняли вызов. Она реализуется, как автономное дополнение к инфраструктуре сети мобильной связи и не требует модификаций радиоинтерфейса, мобильных телефонов или оборудования сотовой сети. Для реализации угломерной технологии используются специально разработанные антенные фазированные решетки, устанавливаемые на базовых станциях.
Sigma-5000 обеспечивает позиционирование в сетях сотовой связи стандартов АМРS/ТDМА (1S-136). Пропускная способность системы — до 50 местоопределений в секунду. Время получения первого отсчета — в пределах 2 с после прихода вызова. Расчетная погрешность определения положения: СКО (в 67% случаев) — менее 90 м, максимальная (в 95% случаев) — 125 м. Испытания Sigma-5000 в реальных условиях показали во всей рабочей зоне результирующую погрешность не хуже 105 м для 67% случаев и точность лучше 150 м для 95% случаев.
Подобная комбинация технологий реализована и в системе Geometrix, разработанной отделением Grayson Wireless компании Allen Telecom. Geometrix может работать с аналоговыми и цифровыми системами связи стандартов АМРS, ТDМА (1S-136), СDМА (1S-95), ТDМА/АМРS, СDМА/АМРS и системой iDEN производства компании Motorola. В большинстве случаев Geometrix удовлетворяет требованиям по точности, используя только метод ТDОА, а комбинация методов АОА и ТDОА применяется лишь в некоторых случаях. Во всех режимах Geometrix также использует алгоритмы пространственной селекции сигналов для снижения ошибок, вызванных многолучевостью. В условиях очень большой многолучевости Geometrix может переходить в режим проведения измерений с четырех станций. Система может совместно использоваться сразу несколькими операторами услуг мобильной связи, т.к. даже в базовой конфигурации Geometrix способна обеспечить выполнение более сотни позиционирований в секунду.
система позиционирования по "радиоотпечаткам"
Система RadioCamera, разработанная компанией U.S. Wireless Corp. для определения местоположения пользователей мобильных телефонов стандарта СDМА, использует метод сопоставления образов местонахождения LРМ и может быть отнесена к классу корреляционно-экстремальных. Особенность ее функционирования заключается в следующем. Сигналы, отражаясь от строений и других препятствий, претерпевают определенные искажения и достигают базовой станции по многочисленным маршрутам. Система RadioCamera анализирует уникальные характеристики сигнала, включая варианты его "многомаршрутного" распространения и компилирует его "отпечаток", который автоматически сравнивается с базой данных предварительно идентифицированных мест расположения телефонов в районе данной базовой станции. В отличие от других технологий позиционирования в данной системе вполне достаточно, чтобы только одна базовая станция обработала сигнал вызова.
Для идентификации положения система RadioCamera не требует прямой видимости многочисленных базовых станций, что делает ее работу высокоэффективной в условиях плотной городской застройки, где сейчас постоянно находятся более 70% всех радиотелефонов. Система RadioCamera также совместима с существующей сетевой инфраструктурой, легко интегрируется и не требует никаких модификаций базовых станций или абонентских телефонов. Интеллектуальная база данных системы начинает формироваться сразу после начала ее развертывания и становится работоспособной уже через несколько дней.
интегрированные системы
В настоящее время разработаны и интегрированные системы позиционирования. Данный способ олицетворяет собой подход к решению проблемы местоопределения, основанный на "дополнительном оборудовании на стороне клиента", которое встраивается непосредственно в пользовательский терминал, для чего используется специальный чип, реализующий "GPS в телефоне". Компания SnapTrack Inc.создала систему, объединяющую GPS с инфраструктурой сети беспроводной связи и дающую точность от 5 до 75 м (в среднем 10-20 м).
Технически система SnapTrack опирается на возможности системы GPS, но с существенным их расширением, путем распределения задачи обработки цифровых данных между запатентованными программными алгоритмами, исполняемыми процессором сотового телефона, и специализированным программным обеспечением, установленным на сервере системы.
В итоге, если традиционные приемники GPS постоянно ведут обработку данных, то в системе SnapTrack он работает только непосредственно при определении положения. А конкретно, когда абонент запрашивает услугу определения местоположения, его терминал, оборудованный системой SnapTrack, принимает пакет данных GPS, обрабатывает его и передает полученную информацию на сервер системы. Сервер вычисляет долготу и широту и осуществляет целый ряд процедур для достижения более высокой точности определений путем использования дифференциального режима работы и учета большого числа поправок, снижающих влияние многолучевости и других искажений сигналов.
точность систем местоопределения
Сложность решения проблемы точности позиционирования в системах мобильной связи и определяет достаточно большое число видов систем мобильного позиционирования. Известны более двух десятков систем, использующих "интеллектуальные" антенны, угол прихода сигналов, разность времени их прихода, амплитуду сигналов, систему GPS и комбинации этих методов. Достигаемые точности определения координат сотового телефона варьируются в пределах от единиц до сотен метров (табл. 1).
Табл. 1. Сравнение точности определения координат различными системами местоопределения.
| Система позиционирования | Фирма-производитель | Точность, м | Быстродействие, с | Особенности |
| Mobile Positioning System | Ericsson | 100 | 5 | - |
| Cellocate System | Cell-Loc Inc. | 150 (AMPS) 15-90 (CDMA) | 1 | - |
| Cursor | Cambridge Positioning Systems | 50 | 5 | Доп. чип с ПО в мобильном телефоне |
| TeleSentinel | KSI Inc. + TruePosition | 125 | <10 | - |
| Sigma-5000 | SigmaOne Communication Corp. | 90-150 | <2 | Доп. фазированные антенные решетки на базовых станциях |
| Geometrix | Allen Telecom | <150 | <1 | Доп. фазированные антенные решетки на базовых станциях |
| RadioCamera | U.S.Wireless Corp. | 50 | 2 | - |
| SnapTrack | SnapTrack Inc. | 3-20 | n/a | Доп. чип с ПО в мобильном телефоне |
| Finder | CellPoint | 75 | 5 | n/a |
Достаточно однозначные зависимости между значениями параметров сигналов и положением телефона имеют место только в теории при распространении радиосигналов в так называемом "свободном пространстве". На практике точность позиционирования зависит от очень многих факторов. Например, для городских условий характерен многолучевой прием сигналов, при котором как на мобильный телефон, так и на базовую станцию приходят как прямые, так и отраженные от различных объектов радиосигналы. При этом параметры сигналов непрерывно изменяются в широком диапазоне, что значительно затрудняет определение фактических координат. Вместе с тем с помощью систем позиционирования, задействующих GPS, можно отслеживать и перемещение абонента в автомобиле на автомагистрали.
рынок систем местоопределения
По оценкам Ovum, к 2005 г., когда системы местоопределения станут стандартным приложением в сетях сотовой связи, в США будет 129 млн., а в Западной Европе — 188 млн. абонентов, пользующихся услугами позиционирования. По тем же оценкам, рынок автомобильных средств местоопределения в США будет составлять 3,3 млн. личных автомобилей ( в Западной Европе — 8 млн) и 3,8 млн автомашин транспортных компаний (в Западной Европе — 1,9 млн). Общий объем мирового рынка, по прогнозам Ovum, в 2005г. будет составлять $9,75 млрд. при количестве в 376 млн. абонентов. Похожие оценки дают эксперты из компании Consultants Strategis, которые предполагают, что уже в 2004г., мировой объем услуг по определению местонахождения составит около $4 млрд.
Мобильные услуги с определением местоположения абонента являются услугами добавленной стоимости, дают толчок развитию новых приложений быстрорастущего рынка беспроводной передачи данных и позволяют операторам и провайдерам, действующим на рынке мобильной связи, дифференцировать свои предложения, укрепить доверие клиентов и создать за счет этого дополнительные доходы.
Основная задача разработанного компанией Siemens приложения m.traction Resource Control — обеспечение мониторинга и связи находящихся на выезде сотрудников компании, имеющих мобильные телеофоны. Оно дополняет имеющийся у оператора портфель приложений мобильной связи и расширяет круг возможностей, предоставляемых в распоряжение клиента. Приложение m.traction Resource Control представляет особый интерес для таких пользователей, как:
— курьерские службы и службы посыльных;
— коммунальные предприятия;
— компании, занимающиеся утилизацией отходов;
— грузоотправители и переовзчики;
— компании, занимающиеся грузовыми автоперевозками;
— автобусные компании;
— таксомоторные компании;
— торговые и сервисные компании;
— компании, занимающиеся прокатом автомобилей;
— компании, занимающиеся доставкой товаров на дом.
проблемы развития
Основные сложности, которые могут препятствовать массовому внедрению систем местоопределения в сотовых сетях, являются "обратной стороной медали" их достоинств. Дело в том, что новые возможности решения вопросов обеспечения безопасности, которые открывают услуги позиционирования в сетях сотовой связи, таят и определенные угрозы в области неприкосновенности частной жизни. Эксперты отмечают возможность двойного назначения подобных технологий, так как появляется теоретическая возможность отслеживания перемещения владельца мобильного телефона, а это уже начало вторжения в частную жизнь. У многих абонентов сотовых сетей существует мнение, что возможностями местоопределения будут пользоваться не только правоохранительные органы и службы спасения, но и преступные группировки, обладающие соответствующими техническими возможностями. И это мнение имеет под собой обоснование. Поэтому до широкого внедрения услуг позиционирования в сотовых сетях предстоит решить задачу обеспечения строгой конфиденциальности сведений о местоположении абонентов сотовой связи и защите этих сведений от злоумышленников.
Именно с этой целью Европейская комиссия по связи еще в самом начале внедрения услуг позиционирования подвижных объектов в сетях сотовой связи, являющихся системами массового обслуживания, определила требования, которых должны придерживаться компании, предоставляющие услуги местоопределения. В частности, средства местоопределения должны использоваться исключительно в первоначально заявленных целях, например, для оказания технической помощи на дорогах, и не допускать двойного применения. При ведении баз данных информация о запросах местоположения должна быть конфиденциальной и обеспечивать анонимность абонентов. Так, компания CPS уже ввела в свою систему позиционирования Cursor опцию отключения системы по желанию клиента. Аналогичная возможность предусматривается и в ряде других систем. В системе SnapTrack, например приняты более жесткие меры по обеспечению анонимности абонента. Пользователь может инициировать процесс местоопределения только по набору номера "911" или по специальному требованию. Без такого прямого запроса абонента никакая информация о местоположении сотовым телефоном вообще не генерируется.
Реферат слушателя 4-го курса ИКСИ, научный руководитель — Кунегин С. И.
обсуждение статьи
Сетевые решения. Статья была опубликована в номере 03 за 2004 год в рубрике технологии
