Отправляемся на Марс
Отправляемся на Марс
 О новостях экспедиции марсоходов Spirit и Opportunity нам оперативно сообщают буквально все средства массовой информации. Но современные технологии позволяют не только прочитать, увидеть и услышать, но буквально пощупать все своими руками.
О новостях экспедиции марсоходов Spirit и Opportunity нам оперативно сообщают буквально все средства массовой информации. Но современные технологии позволяют не только прочитать, увидеть и услышать, но буквально пощупать все своими руками.
Речь идет о специально созданной программе Maestro, предназначенной для управления марсоходами и изучения полученной с Марса информации. Упрощенную версию программы можно скачать с сайта http://mars.telascience.org/ . Нам не будет позволено реально управлять марсоходами, но режим симуляции с формированием 3D-модели движения впечатляет.
Вдобавок можно просматривать и изучать множество переданных марсианских изображений. Причем некоторые из них можно рассматривать в 3D (проверить 3D-режим не удалось, так как программа сообщила, что компьютер его не поддерживает). Программа написана на Java, так что есть возможность работы в различных ОС. На сайте разработчика указано, что для работы программы требуется:
— 256 Мб оперативной памяти;
— 100 Мб дискового пространства;
— процессор уровня Pentium III;
— 3D-видеокарта.
Но на практике 512 Мб ОЗУ очень даже не помешают, да и на обновления потребуется дополнительное место на жестком диске.
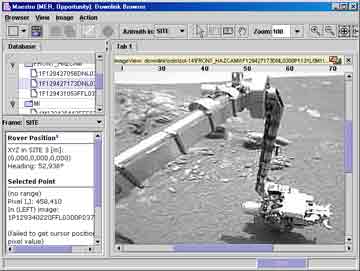
По мере продвижения миссии марсоходов на страничку http://mars.telascience.org/update добавляются модули обновления баз данных. Обновления имеют несколько необычную структуру. Кроме непосредственно набора изображений с Марса, каждое из них включает в себя интерактивный курс, который описывает содержимое загруженного модуля. По мере установки обновлений в стартовое меню добавляются новые пункты для изучения (см. рис. 1). Примеры работы с программой Maestro показаны на рис. 2 и 3.
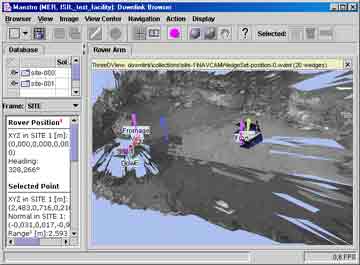
В режиме 3D-моделирования навигации марсохода можно при помощи различных кнопок мыши перетаскивать и вращать модель в различных плоскостях. При помощи колесика мыши модель можно приближать и удалять.
Специальный редактор позволяет запрограммировать робот на выполнение определенного задания (например, перемещение вперед, поворот, управление манипулятором). О правилах пользования программой вам расскажет специальный интерактивный курс.
Для исследования доступны изображения следующих камер:
— Hazard Camera (Hazcam) — камера предупреждения, расположена впереди;
— Navigation Camera (Nav-cam) — навигационная черно-белая широкоформатная камера (стерео, т.е. две камеры), которая расположена на мачте робота и способна вращаться и наклоняться почти в любом направлении. Эта камера предназначена для навигации (идентификации местоположения робота);
— Panoramic Camera (Pancam) — панорамная цветная камера (стерео) высокого разрешения, которая также расположена на мачте робота. Стереокамеры Pancam и Navcam расположены на высоте, соответствующей росту человека, для имитации видения человека;
— Mini-Thermal Emission Spectrometer (Mini-TES) — камера инфракрасного видения, которая позволяет наблюдать тепловое излучение исследуемых объектов;
— Microscopic Imager (MI) — камера сильного увеличения (лупа), которая расположена на механическом манипуляторе (руке). Эта камера дает крупным планом изображения исследуемых объектов (камни, почва).
На механическом манипуляторе собрано несколько инструментов для геологической разведки. Кроме камеры сильного увеличения, там закреплен бур (крот) для взятия проб почвы. Вдобавок там же закреплены два спектрометра для детального изучения состава камней и почвы. Для обработки изображений в состав Maestro введен набор фильтров, позволяющий преобразовывать изображения, которые можно сохранять во внешний графический файл.
Сергей Бердачук,
Berdachuk@tut.by http://berdachuk.at.tut.by
Речь идет о специально созданной программе Maestro, предназначенной для управления марсоходами и изучения полученной с Марса информации. Упрощенную версию программы можно скачать с сайта http://mars.telascience.org/ . Нам не будет позволено реально управлять марсоходами, но режим симуляции с формированием 3D-модели движения впечатляет.
Вдобавок можно просматривать и изучать множество переданных марсианских изображений. Причем некоторые из них можно рассматривать в 3D (проверить 3D-режим не удалось, так как программа сообщила, что компьютер его не поддерживает). Программа написана на Java, так что есть возможность работы в различных ОС. На сайте разработчика указано, что для работы программы требуется:
— 256 Мб оперативной памяти;
— 100 Мб дискового пространства;
— процессор уровня Pentium III;
— 3D-видеокарта.
Но на практике 512 Мб ОЗУ очень даже не помешают, да и на обновления потребуется дополнительное место на жестком диске.
По мере продвижения миссии марсоходов на страничку http://mars.telascience.org/update добавляются модули обновления баз данных. Обновления имеют несколько необычную структуру. Кроме непосредственно набора изображений с Марса, каждое из них включает в себя интерактивный курс, который описывает содержимое загруженного модуля. По мере установки обновлений в стартовое меню добавляются новые пункты для изучения (см. рис. 1). Примеры работы с программой Maestro показаны на рис. 2 и 3.
В режиме 3D-моделирования навигации марсохода можно при помощи различных кнопок мыши перетаскивать и вращать модель в различных плоскостях. При помощи колесика мыши модель можно приближать и удалять.
Специальный редактор позволяет запрограммировать робот на выполнение определенного задания (например, перемещение вперед, поворот, управление манипулятором). О правилах пользования программой вам расскажет специальный интерактивный курс.
Для исследования доступны изображения следующих камер:
— Hazard Camera (Hazcam) — камера предупреждения, расположена впереди;
— Navigation Camera (Nav-cam) — навигационная черно-белая широкоформатная камера (стерео, т.е. две камеры), которая расположена на мачте робота и способна вращаться и наклоняться почти в любом направлении. Эта камера предназначена для навигации (идентификации местоположения робота);
— Panoramic Camera (Pancam) — панорамная цветная камера (стерео) высокого разрешения, которая также расположена на мачте робота. Стереокамеры Pancam и Navcam расположены на высоте, соответствующей росту человека, для имитации видения человека;
— Mini-Thermal Emission Spectrometer (Mini-TES) — камера инфракрасного видения, которая позволяет наблюдать тепловое излучение исследуемых объектов;
— Microscopic Imager (MI) — камера сильного увеличения (лупа), которая расположена на механическом манипуляторе (руке). Эта камера дает крупным планом изображения исследуемых объектов (камни, почва).
На механическом манипуляторе собрано несколько инструментов для геологической разведки. Кроме камеры сильного увеличения, там закреплен бур (крот) для взятия проб почвы. Вдобавок там же закреплены два спектрометра для детального изучения состава камней и почвы. Для обработки изображений в состав Maestro введен набор фильтров, позволяющий преобразовывать изображения, которые можно сохранять во внешний графический файл.
Сергей Бердачук,
Berdachuk@tut.by http://berdachuk.at.tut.by
Компьютерная газета. Статья была опубликована в номере 08 за 2004 год в рубрике soft :: разное
