Человек и машина: пути к взаимозаменяемости
Человек и машина: пути к взаимозаменяемости

В последнее время мы часто сталкиваемся с подобием между людьми и робототехническими/компьютерными системами, ими созданными. Если говорить об упрощенной блок-схеме, то можно перечислить ряд подобных устройств, а именно наличие сенсоров (у людей нервы, у систем — датчики и конверторы), центрального процессора (мозг, компьютер) и приводов (мышцы, моторы и приводы).
Таким образом, если тривиально все упростить, то мы говорим об абсолютно подобных системах. Помните фразу, что, "прежде чем освоить космос, человек должен все узнать о себе"? Нужно отметить, что люди в своей действительности проникли достаточно глубоко, им подвластно клонирование, идет активная работа со стволовыми клетками, компьютеры выигрывают у лучших шахматистов. С другой стороны, активно развивается робототехника, а это более совершенные материалы, наличие более уникальных устройств. Каких? К примеру, современные роботы имеют гораздо больше степеней свободы в движениях, нежели это дано человеку. Помимо сего, мы слышим и видим только в определенных диапазонах. А современные датчики позволяют воспринимать ультрафиолет, инфракрасное излучение, ультразвук, инфразвук, уровень радиации и так далее.
Поэтому взаимодействие человека и современных машин ведет к усовершенствованию самого человека. Ведь мы не похожи на своих предков, живших несколько тысяч лет назад. Так же, как и наши потомки не будут похожи на нас.
Практическая биомеханика
Биомеханикой можно назвать целый раздел современной науки, связанный с медициной, биологией, физикой и т.д. Это даже можно смело называть отдельной наукой. Для примера можно взять устройство глаза. Биомеханика этого человеческого органа достаточно сложна, поскольку мы можем его открыть и закрыть, природой предусмотрено много защитных функций, да и сам механизм зрения очень сложный.
В конце прошлого века в США была разработана система искусственного зрения, в результате чего можно сказать о том, что электроника заменяет биомеханику. Светочувствительные элементы, на базе которых построены подобные системы, преобразуют изображение и передают его на встроенные электронные микроузлы. Информация передается в электронную часть, вживленную в мозг. При этом мозг может управлять в данном случае электроникой, что уже не в диковинку.
В 1956 году в СССР группой ученых: А.Е. Кобринским, Я.С. Якобсоном, Е.П. Поляным, Я.Л. Славуцким, А.Я. Сысиным, М.Г. Брейдо, В.С. Гурфинкелем и М.Л. Цетлиным, — была разработана "биоэлектрическая рука". Был создан макет, позволяющий с помощью мозга управлять механической кистью. После выставки в Брюсселе, на которой был продемонстрирован этот макет, лицензии на данное изобретение приобрели некоторые развитые капиталистические страны. Напомню, что это был 1956 год.
Еще стоит отметить достаточно известное направление применения электроники — устройства для людей, имеющих болезни слуха. На самом деле происходящее на данный момент в этой области не предстает в виде четкой картины. Изобретений и их реализаций очень много. Мы уже знаем, какими могут быть миниатюрные микрофоны. Дополнительно с этим стоит отметить, что с помощью компьютерной оболочки можно путем программных преобразований воссоздавать звуковые картины и передавать их в удобном виде в мозг при минимуме входящих данных. Далее вопрос к бионикам и нейрофизиологам...
То есть, можно сказать, что, пока идет изучение стволовых клеток и возможности клонирования как человека, так и его отдельных органов, исследования в области биомеханики, нейрофизиологии, кибернетики и электроники дают свои результаты. Наиболее успешное практическое применение — медицина.
Теория разума для роботов-гуманоидов
До этого мы смотрели на происходящее с точки зрения человека. Теперь давайте посмотрим на все со стороны машин. Не говоря о фантастических романах, стоит отметить, что теория разума роботов-гуманоидов была освещена во многих научных работах. В сентябре 2000 года состоялась первая IEEE/RSJ интернациональная конференция, посвященная роботам-гуманоидам (теперь она проводится каждый год). Одним из ее итогов явилась публикация Брайана Скасселлати (B. Scassellati) "Theory of Mind for a Humanoid Robotics".
Задачей проекта, который ведет сейчас Брайан, является создание "умной" визуальной системы для роботов. Например, роботы сейчас не могут узнавать людей по лицам, следить за движущимися объектами. То есть, по сути говоря, мы сейчас имеем дело с обыкновенными движущимися фотоаппаратами и видеокамерами. Интеллектуальная видеосистема же должна выделять объекты, производить анализ и самообучаться. Сейчас созданы две опытные модели — Baron Cohen и Leslie, — обучающиеся пока за счет людей. Автор проводит аналогию с тем, как дети учатся у взрослых — точно так же роботы учатся у людей.
Реализация результатов исследований Брайана Скасселлати очень интересна. Основы теории способности мышления у роботов-гуманоидов представлены в структуре, разработанной для робота Leslie и реализованной в модуле ToBY (Theory of Body) (см. рис.1).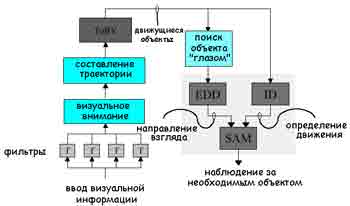
ToBY применяет несколько простых физических законов к объектам для определения, движущиеся они или нет. На данном этапе происходит так называемая сортировка объектов. При этом те, которые кажутся недвижущимися, остаются под наблюдением в режиме ожидания от них движения. В отношении обнаруженных движущихся объектов производится анализ. В модуле EDD (Eyes Direction Detector) определяется направление взгляда на интересующий объект, в ID (Intentionality Detector) происходит анализ движения объектов. Вся информация поступает на блок SAM (Shared Attention Mechanism) и в результате на выходе мы имеем детектирование окружающих объектов и наблюдение за движущимися.
Далеко ходить не надо: сейчас любой читатель может увидеть датчики движения, которые встроены в современные системы видеонаблюдения и освещения. Они просты по принципу работы и достаточно действенны. Поэтому проект, реализуемый Брайаном Скасселлати, более чем реальный.
Данное исследование находится еще на своем старте: как мы видим, было создано только два робота-гуманоида с достаточно примитивными возможностями анализа окружающего мира. При этом движущиеся "глаза" наподобие человеческих еще не созданы, но задачей исследовательского проекта является и реализация этого в том числе.
А теперь давайте чуть-чуть представим себе дальнейшее развитие ситуации. Если такие роботы появятся, у них на борту будет анализ объектов и возможность их запоминания. Таким образом робот сможет нас узнать при встрече. Насчет того, чтобы дружески похлопать по плечу, мы рассмотрим несколько позже:).
Одна из особенностей человеческого мозга — лабильность памяти, то есть мы забываем ненужную нам информацию. С роботом, в сердце которого будет стучать с тактовой частотой процессор, а в голове находиться винчестер, все пойдет несколько иначе. Данные будут храниться все, и главным параметром будет скорость доступа к ним.
Кроме этих исследований, стоит отметить еще один интересный аспект. Звук также может поддаваться анализу. Например, человеческий голос сродни отпечатку пальцев, то есть на базе анализа звуковых составляющих оного можно создать базу данных. Если я не ошибаюсь, такая уже разработана в МВД Беларуси и многих других стран. Интересно здесь немного другое: главенствующие позиции в реализации подобных систем занимают математические алгоритмы и кибернетика. Данные просчитывает компьютер. Поэтому модуль анализа звука также можно внедрить в робота.
Теперь пойдем далее по этапам. Технологии распознавания речи начали серьезно разрабатываться в 80-90-х прошлого века. Думаю, что многие читатели сталкивались или хотя бы слышали о программе Dragon Dictate, которая позволяет диктовать текст с микрофона прямо в приложение Microsoft Word. Кстати, у этой программы со временем появилось несколько конкурентов. Проблема у всех подобных реализаций одна — качество распознавания оставляет желать лучшего. Да и, к тому же, дикция у половины населения… хм... не совсем дикторская. Но алгоритмы такого преобразования уже есть, далее они будут только совершенствоваться. Таким образом, компьютерный мозг робота скоро сможет понимать человеческую речь, и не только на уровне команд, как это сейчас реализовано в роботах-игрушках и некоторых мобильных телефонах, но и в виде связной речи. Обратные по действию программы — преобразования текста в речь — также существуют уже давно. Например, Text-To-Speech и т.п. То есть, если компьютер может разговаривать, то вскоре он сможет и вразумительно отвечать на поставленные вопросы.
Помните о том, что сказал Брайан Скасселлати: робот сейчас учится у человека, как ребенок у взрослого.
Далее давайте пройдемся по нашим "пяти чувствам": зрение, слух, осязание, обоняние, вкус. Зрение и слух мы уже подробно рассмотрели. Обоняние также доступно компьютеру благодаря химическому анализу окружающей среды. При этом вариант с компьютером отличается в лучшую сторону, поскольку мы не можем определить состав жидкостей и газовых сред, несовместимых с воздухом. Это схоже с тем, что мы не можем видеть ультрафиолет, а электроника может. При этом стоит отметить, что сейчас уже стали распространяться компьютерные устройства, воспроизводящие запахи — новости об этом изобретении довольно часто проходили в СМИ.
Осязание мы рассмотрим несколько подробнее позже. Вкус же роботам не будет нужен: у них есть возможности химического анализа. Правда, недавно я прочел новость о том, что в Англии изобрели робота, собирающего слизняков на виноградных листьях (это честно, я не шучу). Причем они продаются и стоят $3000. В качестве топлива для себя такой робот использует собранных слизняков. Поэтому делаем вывод: роботам чувство вкуса точно не нужно!
Зато как приятно будет пообщаться: "16745-й, ты где был?" — "Сли-зня-к'ов йел!"
 Биохимические подсистемы роботов-гуманоидов
Биохимические подсистемы роботов-гуманоидов
Конечно, название данного подраздела можно было взять в кавычки... А может, и нет. Что характеризует работоспособность человеческого организма? Метаболизм, или, говоря иначе, обмен веществ. Мы, например, можем чувствовать усталость, реагировать на проявления внешней среды и так далее. У роботов-гуманоидов есть нечто схожее. Эти механические организмы обладают своим собственным обменом веществ и энергообменом.
Интересные исследования по данному поводу провела группа под управлением Брайана Адамса (не путать с певцом!), создав робота по имени Cog. Задачей этого робота было работать и уставать. В будущем предусмотрено, что он будет способен на большее количество человеческих чувств или эмоций, а именно сможет злиться, чувствовать усталость, одиночество, волнение. Достаточно интересно отметить тот факт, что это один из немногих роботов, которому разработали лицо, похожее на человеческое. На базе Cog был проведен еще ряд интересных опытов, не касающихся темы данного раздела. В принципе, это современный андроид, что уж тут скрывать.
В случае с опытами по чувствам мы имеем дело с имитацией, которую также можно пронаблюдать в современных роботах-игрушках, так любимых японскими детьми — они (роботы) могут жестикулировать и менять настроение.
Если нужен более интерактивный вариант, то лучше вспомнить тамагоччи, которыми была увлечена вся наша страна в середине 90-х. Помните? "Я забыл покормить песика, и он у меня издох, дайте мне, пожалуйста, новый, а то дочка мылит веревку!"
Компьютерные игры имеют массу подобных интерактивных реализаций.
"Чувствительность кончиков пальцев"
Достаточно интересными на сегодня являются исследования, производимые в лаборатории Touch Lab при Массачусетском Институте Технологий (MIT). Они также обратили внимание на схожесть биомеханических и электронно-компьютерных систем. И задачей их исследований явилось изучение одной из самых сложных современных тем — чувствительности человеческой кожи. Как мы знаем, кончики наших пальцев — это одни из самых сложнейших нервных окончаний. Именно исследования касания заняли несколько лет работы этой лаборатории.
Человеческая кожа является уникальным слоем, совмещающим в себе очень много функций, и исследователи до сих пор изучают ее осязательные возможности. Если мы говорили о совмещении электроники и биомеханики, то реализация тактильных ощущений — достаточно новое направление в области современной науки. Хотя цели данных исследований могут на первый взгляд казаться не очень понятными, акценты расставлены правильно: доскональное изучение одного из "пяти чувств" таким образом, чтобы можно было создать механические модели, воспроизводящие в основных чертах это явление. Тактильные ощущения дают мозгу информацию, не меньшую, чем зрение и слух. Одной из задач данного исследования является создание механической модели, повторяющей нажатие пальцем.
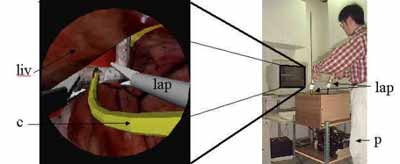
У роботов, которые сейчас разрабатываются, все зеркально: установлены сенсоры давления, тем самым заменяя тактильные ощущения кожи. При этом у машин есть преимущества: их можно сделать миниатюрными, что и используется в современной микрохирургии.
Для придания дополнительной научно-популярности данному материалу могу сказать, что вы можете прямо сейчас купить для своего компьютера руки. Стоит каждая около 1500 фунтов и свободно распространяется на сайте www.robotica.co.uk . Называется это чудо техники EduBot, подключается к компьютеру в стандартный порт и программно управляется (нужно установить специальное ПО). Дополнительные параметры: пять степеней свободы, полезная нагрузка — 250 граммов.
"Пять чувств"
Итак, со всеми пятью чувствами мы разобрались. Практически все компьютеризируется, и составляются математические и механические модели. Компьютер — незаменимый помощник, но именно он одновременно является и прототипом мозга роботов. Поэтому... как бы это сказать, чтобы не прозвучало упаднически — техника, нами созданная, во многом нас превосходит, а мы ее еще и обучаем, как это делает Брайан Скасселлати:). Это самое веселое, что можно сказать после написания данной статьи. Я имел в виду, что наше будущее в надежных и прочных руках:).
Ладно, отвлеку вас как-то еще на что-нибудь в следующий раз (в Японии пройдет выставка роботов-гуманоидов Robotex), а сам пойду есть вермишель с искусственным заменителем вкуса, идентичным натуральному, искусственным заменителем цвета, идентичным натуральному, стабилизатором цвета, улучшителем вкуса Е..., искусственным заменителем запаха, идентичным натуральному, стабилизатором Е... (другое Е) и тремя жирными пятнами на водяной поверхности...

P.S.: Современные фантасты как-то неинтересны:).
Кристофер-2003,
christopher@tut.by
В последнее время мы часто сталкиваемся с подобием между людьми и робототехническими/компьютерными системами, ими созданными. Если говорить об упрощенной блок-схеме, то можно перечислить ряд подобных устройств, а именно наличие сенсоров (у людей нервы, у систем — датчики и конверторы), центрального процессора (мозг, компьютер) и приводов (мышцы, моторы и приводы).
Таким образом, если тривиально все упростить, то мы говорим об абсолютно подобных системах. Помните фразу, что, "прежде чем освоить космос, человек должен все узнать о себе"? Нужно отметить, что люди в своей действительности проникли достаточно глубоко, им подвластно клонирование, идет активная работа со стволовыми клетками, компьютеры выигрывают у лучших шахматистов. С другой стороны, активно развивается робототехника, а это более совершенные материалы, наличие более уникальных устройств. Каких? К примеру, современные роботы имеют гораздо больше степеней свободы в движениях, нежели это дано человеку. Помимо сего, мы слышим и видим только в определенных диапазонах. А современные датчики позволяют воспринимать ультрафиолет, инфракрасное излучение, ультразвук, инфразвук, уровень радиации и так далее.
Поэтому взаимодействие человека и современных машин ведет к усовершенствованию самого человека. Ведь мы не похожи на своих предков, живших несколько тысяч лет назад. Так же, как и наши потомки не будут похожи на нас.
Практическая биомеханика
Биомеханикой можно назвать целый раздел современной науки, связанный с медициной, биологией, физикой и т.д. Это даже можно смело называть отдельной наукой. Для примера можно взять устройство глаза. Биомеханика этого человеческого органа достаточно сложна, поскольку мы можем его открыть и закрыть, природой предусмотрено много защитных функций, да и сам механизм зрения очень сложный.
В конце прошлого века в США была разработана система искусственного зрения, в результате чего можно сказать о том, что электроника заменяет биомеханику. Светочувствительные элементы, на базе которых построены подобные системы, преобразуют изображение и передают его на встроенные электронные микроузлы. Информация передается в электронную часть, вживленную в мозг. При этом мозг может управлять в данном случае электроникой, что уже не в диковинку.
В 1956 году в СССР группой ученых: А.Е. Кобринским, Я.С. Якобсоном, Е.П. Поляным, Я.Л. Славуцким, А.Я. Сысиным, М.Г. Брейдо, В.С. Гурфинкелем и М.Л. Цетлиным, — была разработана "биоэлектрическая рука". Был создан макет, позволяющий с помощью мозга управлять механической кистью. После выставки в Брюсселе, на которой был продемонстрирован этот макет, лицензии на данное изобретение приобрели некоторые развитые капиталистические страны. Напомню, что это был 1956 год.
Еще стоит отметить достаточно известное направление применения электроники — устройства для людей, имеющих болезни слуха. На самом деле происходящее на данный момент в этой области не предстает в виде четкой картины. Изобретений и их реализаций очень много. Мы уже знаем, какими могут быть миниатюрные микрофоны. Дополнительно с этим стоит отметить, что с помощью компьютерной оболочки можно путем программных преобразований воссоздавать звуковые картины и передавать их в удобном виде в мозг при минимуме входящих данных. Далее вопрос к бионикам и нейрофизиологам...
То есть, можно сказать, что, пока идет изучение стволовых клеток и возможности клонирования как человека, так и его отдельных органов, исследования в области биомеханики, нейрофизиологии, кибернетики и электроники дают свои результаты. Наиболее успешное практическое применение — медицина.
Теория разума для роботов-гуманоидов
До этого мы смотрели на происходящее с точки зрения человека. Теперь давайте посмотрим на все со стороны машин. Не говоря о фантастических романах, стоит отметить, что теория разума роботов-гуманоидов была освещена во многих научных работах. В сентябре 2000 года состоялась первая IEEE/RSJ интернациональная конференция, посвященная роботам-гуманоидам (теперь она проводится каждый год). Одним из ее итогов явилась публикация Брайана Скасселлати (B. Scassellati) "Theory of Mind for a Humanoid Robotics".
Задачей проекта, который ведет сейчас Брайан, является создание "умной" визуальной системы для роботов. Например, роботы сейчас не могут узнавать людей по лицам, следить за движущимися объектами. То есть, по сути говоря, мы сейчас имеем дело с обыкновенными движущимися фотоаппаратами и видеокамерами. Интеллектуальная видеосистема же должна выделять объекты, производить анализ и самообучаться. Сейчас созданы две опытные модели — Baron Cohen и Leslie, — обучающиеся пока за счет людей. Автор проводит аналогию с тем, как дети учатся у взрослых — точно так же роботы учатся у людей.
Реализация результатов исследований Брайана Скасселлати очень интересна. Основы теории способности мышления у роботов-гуманоидов представлены в структуре, разработанной для робота Leslie и реализованной в модуле ToBY (Theory of Body) (см. рис.1).
ToBY применяет несколько простых физических законов к объектам для определения, движущиеся они или нет. На данном этапе происходит так называемая сортировка объектов. При этом те, которые кажутся недвижущимися, остаются под наблюдением в режиме ожидания от них движения. В отношении обнаруженных движущихся объектов производится анализ. В модуле EDD (Eyes Direction Detector) определяется направление взгляда на интересующий объект, в ID (Intentionality Detector) происходит анализ движения объектов. Вся информация поступает на блок SAM (Shared Attention Mechanism) и в результате на выходе мы имеем детектирование окружающих объектов и наблюдение за движущимися.
Далеко ходить не надо: сейчас любой читатель может увидеть датчики движения, которые встроены в современные системы видеонаблюдения и освещения. Они просты по принципу работы и достаточно действенны. Поэтому проект, реализуемый Брайаном Скасселлати, более чем реальный.
Данное исследование находится еще на своем старте: как мы видим, было создано только два робота-гуманоида с достаточно примитивными возможностями анализа окружающего мира. При этом движущиеся "глаза" наподобие человеческих еще не созданы, но задачей исследовательского проекта является и реализация этого в том числе.
А теперь давайте чуть-чуть представим себе дальнейшее развитие ситуации. Если такие роботы появятся, у них на борту будет анализ объектов и возможность их запоминания. Таким образом робот сможет нас узнать при встрече. Насчет того, чтобы дружески похлопать по плечу, мы рассмотрим несколько позже:).
Одна из особенностей человеческого мозга — лабильность памяти, то есть мы забываем ненужную нам информацию. С роботом, в сердце которого будет стучать с тактовой частотой процессор, а в голове находиться винчестер, все пойдет несколько иначе. Данные будут храниться все, и главным параметром будет скорость доступа к ним.
Кроме этих исследований, стоит отметить еще один интересный аспект. Звук также может поддаваться анализу. Например, человеческий голос сродни отпечатку пальцев, то есть на базе анализа звуковых составляющих оного можно создать базу данных. Если я не ошибаюсь, такая уже разработана в МВД Беларуси и многих других стран. Интересно здесь немного другое: главенствующие позиции в реализации подобных систем занимают математические алгоритмы и кибернетика. Данные просчитывает компьютер. Поэтому модуль анализа звука также можно внедрить в робота.
Теперь пойдем далее по этапам. Технологии распознавания речи начали серьезно разрабатываться в 80-90-х прошлого века. Думаю, что многие читатели сталкивались или хотя бы слышали о программе Dragon Dictate, которая позволяет диктовать текст с микрофона прямо в приложение Microsoft Word. Кстати, у этой программы со временем появилось несколько конкурентов. Проблема у всех подобных реализаций одна — качество распознавания оставляет желать лучшего. Да и, к тому же, дикция у половины населения… хм... не совсем дикторская. Но алгоритмы такого преобразования уже есть, далее они будут только совершенствоваться. Таким образом, компьютерный мозг робота скоро сможет понимать человеческую речь, и не только на уровне команд, как это сейчас реализовано в роботах-игрушках и некоторых мобильных телефонах, но и в виде связной речи. Обратные по действию программы — преобразования текста в речь — также существуют уже давно. Например, Text-To-Speech и т.п. То есть, если компьютер может разговаривать, то вскоре он сможет и вразумительно отвечать на поставленные вопросы.
Помните о том, что сказал Брайан Скасселлати: робот сейчас учится у человека, как ребенок у взрослого.
Далее давайте пройдемся по нашим "пяти чувствам": зрение, слух, осязание, обоняние, вкус. Зрение и слух мы уже подробно рассмотрели. Обоняние также доступно компьютеру благодаря химическому анализу окружающей среды. При этом вариант с компьютером отличается в лучшую сторону, поскольку мы не можем определить состав жидкостей и газовых сред, несовместимых с воздухом. Это схоже с тем, что мы не можем видеть ультрафиолет, а электроника может. При этом стоит отметить, что сейчас уже стали распространяться компьютерные устройства, воспроизводящие запахи — новости об этом изобретении довольно часто проходили в СМИ.
Осязание мы рассмотрим несколько подробнее позже. Вкус же роботам не будет нужен: у них есть возможности химического анализа. Правда, недавно я прочел новость о том, что в Англии изобрели робота, собирающего слизняков на виноградных листьях (это честно, я не шучу). Причем они продаются и стоят $3000. В качестве топлива для себя такой робот использует собранных слизняков. Поэтому делаем вывод: роботам чувство вкуса точно не нужно!
Зато как приятно будет пообщаться: "16745-й, ты где был?" — "Сли-зня-к'ов йел!"
Конечно, название данного подраздела можно было взять в кавычки... А может, и нет. Что характеризует работоспособность человеческого организма? Метаболизм, или, говоря иначе, обмен веществ. Мы, например, можем чувствовать усталость, реагировать на проявления внешней среды и так далее. У роботов-гуманоидов есть нечто схожее. Эти механические организмы обладают своим собственным обменом веществ и энергообменом.
Интересные исследования по данному поводу провела группа под управлением Брайана Адамса (не путать с певцом!), создав робота по имени Cog. Задачей этого робота было работать и уставать. В будущем предусмотрено, что он будет способен на большее количество человеческих чувств или эмоций, а именно сможет злиться, чувствовать усталость, одиночество, волнение. Достаточно интересно отметить тот факт, что это один из немногих роботов, которому разработали лицо, похожее на человеческое. На базе Cog был проведен еще ряд интересных опытов, не касающихся темы данного раздела. В принципе, это современный андроид, что уж тут скрывать.
В случае с опытами по чувствам мы имеем дело с имитацией, которую также можно пронаблюдать в современных роботах-игрушках, так любимых японскими детьми — они (роботы) могут жестикулировать и менять настроение.
Если нужен более интерактивный вариант, то лучше вспомнить тамагоччи, которыми была увлечена вся наша страна в середине 90-х. Помните? "Я забыл покормить песика, и он у меня издох, дайте мне, пожалуйста, новый, а то дочка мылит веревку!"
Компьютерные игры имеют массу подобных интерактивных реализаций.
"Чувствительность кончиков пальцев"
Достаточно интересными на сегодня являются исследования, производимые в лаборатории Touch Lab при Массачусетском Институте Технологий (MIT). Они также обратили внимание на схожесть биомеханических и электронно-компьютерных систем. И задачей их исследований явилось изучение одной из самых сложных современных тем — чувствительности человеческой кожи. Как мы знаем, кончики наших пальцев — это одни из самых сложнейших нервных окончаний. Именно исследования касания заняли несколько лет работы этой лаборатории.
Человеческая кожа является уникальным слоем, совмещающим в себе очень много функций, и исследователи до сих пор изучают ее осязательные возможности. Если мы говорили о совмещении электроники и биомеханики, то реализация тактильных ощущений — достаточно новое направление в области современной науки. Хотя цели данных исследований могут на первый взгляд казаться не очень понятными, акценты расставлены правильно: доскональное изучение одного из "пяти чувств" таким образом, чтобы можно было создать механические модели, воспроизводящие в основных чертах это явление. Тактильные ощущения дают мозгу информацию, не меньшую, чем зрение и слух. Одной из задач данного исследования является создание механической модели, повторяющей нажатие пальцем.
У роботов, которые сейчас разрабатываются, все зеркально: установлены сенсоры давления, тем самым заменяя тактильные ощущения кожи. При этом у машин есть преимущества: их можно сделать миниатюрными, что и используется в современной микрохирургии.
Для придания дополнительной научно-популярности данному материалу могу сказать, что вы можете прямо сейчас купить для своего компьютера руки. Стоит каждая около 1500 фунтов и свободно распространяется на сайте www.robotica.co.uk . Называется это чудо техники EduBot, подключается к компьютеру в стандартный порт и программно управляется (нужно установить специальное ПО). Дополнительные параметры: пять степеней свободы, полезная нагрузка — 250 граммов.
"Пять чувств"
Итак, со всеми пятью чувствами мы разобрались. Практически все компьютеризируется, и составляются математические и механические модели. Компьютер — незаменимый помощник, но именно он одновременно является и прототипом мозга роботов. Поэтому... как бы это сказать, чтобы не прозвучало упаднически — техника, нами созданная, во многом нас превосходит, а мы ее еще и обучаем, как это делает Брайан Скасселлати:). Это самое веселое, что можно сказать после написания данной статьи. Я имел в виду, что наше будущее в надежных и прочных руках:).
Ладно, отвлеку вас как-то еще на что-нибудь в следующий раз (в Японии пройдет выставка роботов-гуманоидов Robotex), а сам пойду есть вермишель с искусственным заменителем вкуса, идентичным натуральному, искусственным заменителем цвета, идентичным натуральному, стабилизатором цвета, улучшителем вкуса Е..., искусственным заменителем запаха, идентичным натуральному, стабилизатором Е... (другое Е) и тремя жирными пятнами на водяной поверхности...
P.S.: Современные фантасты как-то неинтересны:).
Кристофер-2003,
christopher@tut.by
Компьютерная газета. Статья была опубликована в номере 14 за 2003 год в рубрике разное :: роботика
